I have an Arduino Mega ADK and would like to make use of the motor shield and the USB port on the Mega ADK for my project. I would like to use the motor controller to drive DC motors on an OWI 535 arm, like I saw on an instructable:
I opened up AFMotor.h and AFMotor.cpp hoping I could just change a pin number, but it looks more complicated than that, as the code was written for the machine, not a n00b programmer like me.
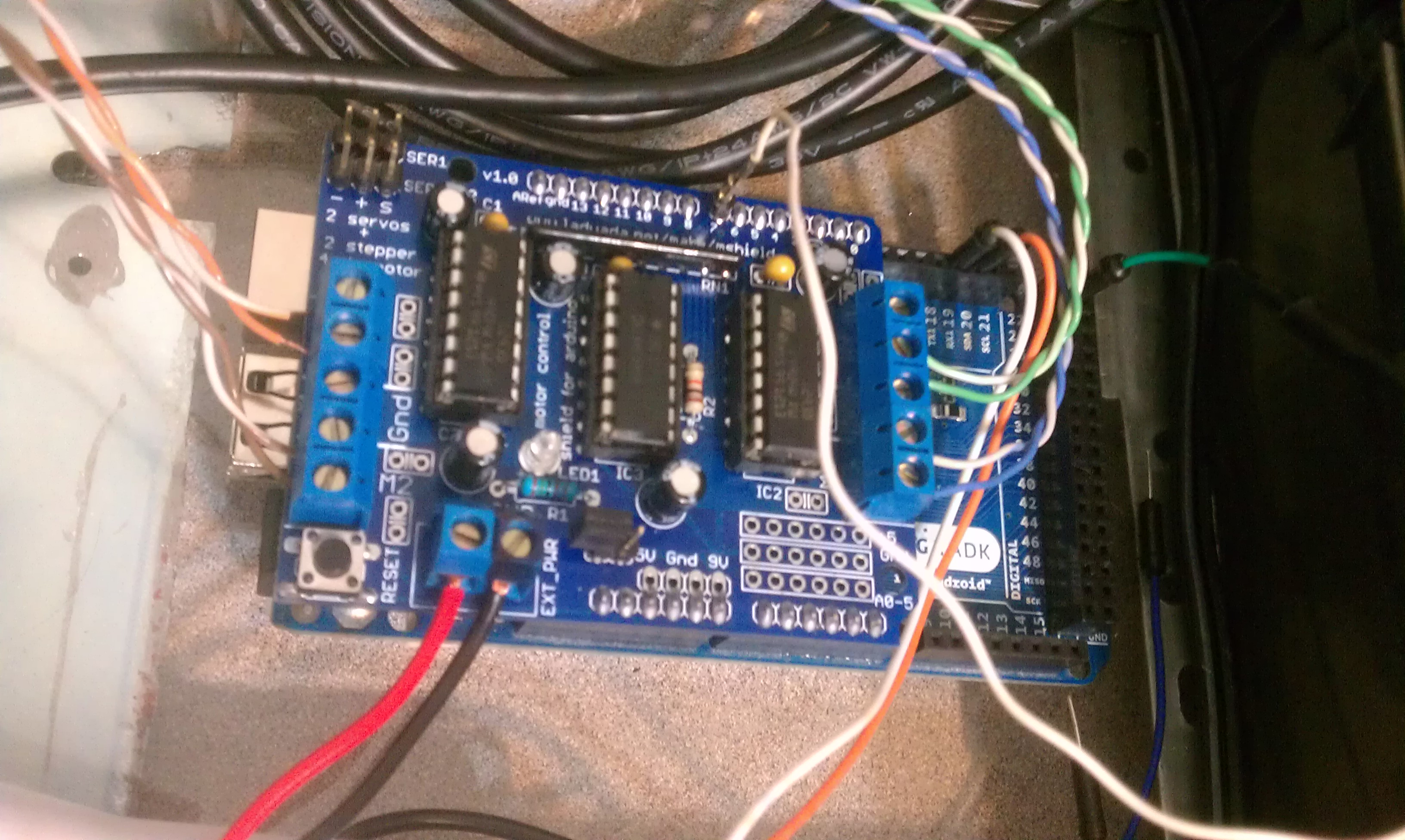
I have this board:
http://www.ladyada.net/make/mshield/
and this arduino:
This is why I need to move pin 7 (from Arduino main page):
USB Host: MAX3421E. The MAX3421E comunicate with Arduino with the SPI bus. So it uses the following pins:
Digital: 7 (RST), 50 (MISO), 51 (MOSI), 52 (SCK).
NB:Please do not use Digital pin 7 as input or output because is used in the comunication with MAX3421E
Non broken out on headers: PJ3 (GP_MAX), PJ6 (INT_MAX), PH7 (SS).
Is moving around pin 7 in code even possible? If so, is it feasible? it looks to me like it's kind of important and would be hard to move or replace. I did try to head this off at the pass by looking up pin numbers and all, but it seems I missed this one. Thankfully I found it before I started trying to get everything working.
The project is an OWI 535 arm on a roomba, and there will be an onboard android phone. Since I'm still testing, the USB is used for bluteooth, and I'll bring the Android in later.
I also posted in the Adafruit forums, but the first response I got was that the board wasn't an Adafruit board because I bougth it on Amazon and I should leave that forum and seek help elsewhere :-/ I don't know where that will go, so I decided to cross pollinate here:
http://forums.adafruit.com/viewtopic.php?f=31&t=35449
Pics of the board and the project:
https://www.facebook.com/media/set/?set=a.10151351037400498.519898.720010497&type=1&l=6e6e410d9c