I'm in a bit of trouble, to say it simple, I have chosen a project to one of my final exam at the ending of this month. The project is about motor controlling to a bigger sun-tracker device (Around 20 kg).
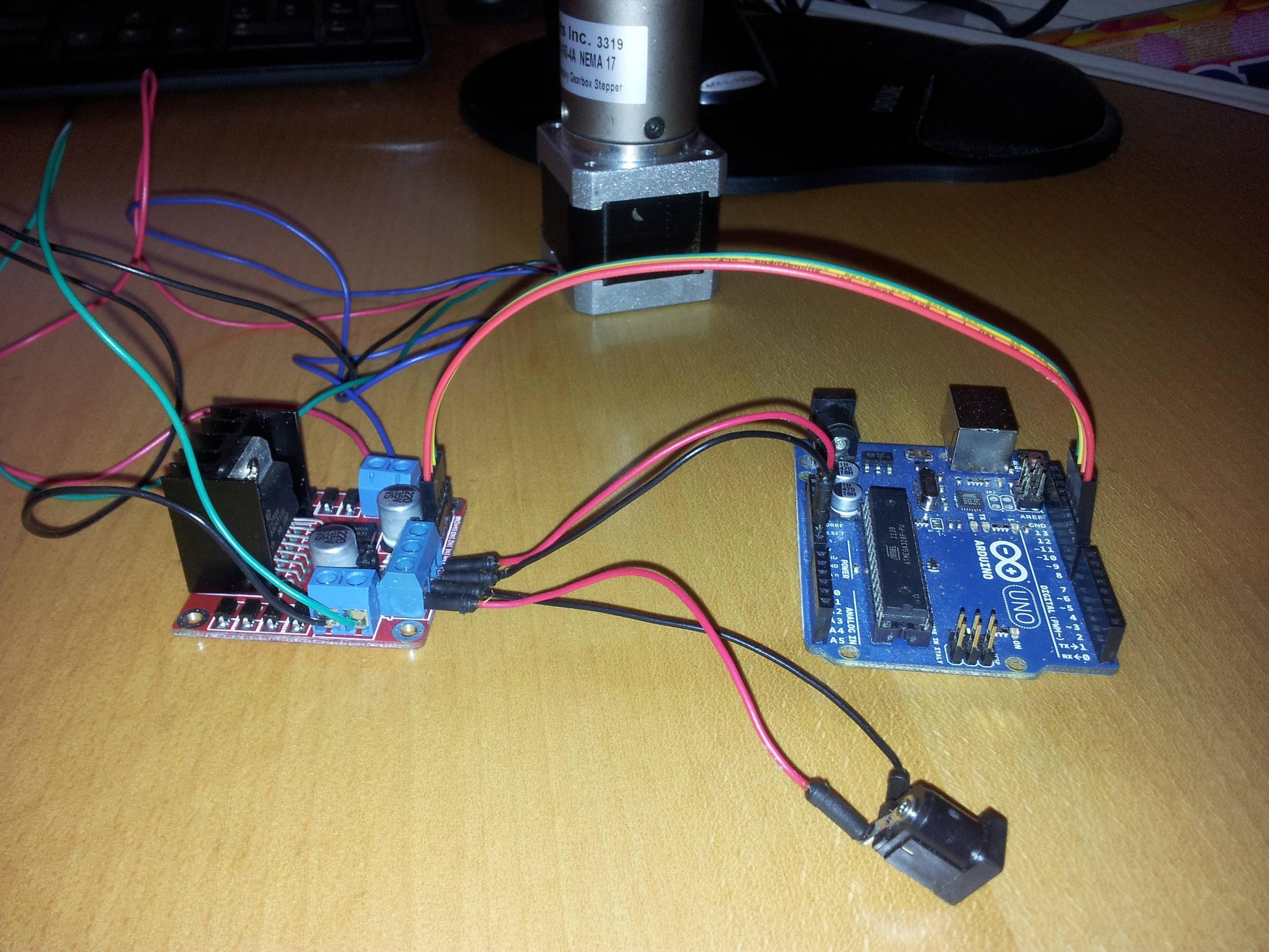
Now to the problem. I've found the phases of the motor and connected them to the output (A,B), on the module. Uploaded the code "One Revolution" to the Arduino, with some changes, so it only runs in one direction. Power supply from external power and power from the Arduino board.
#include <Stepper.h>
const int stepsPerRevolution = 200; // change this to fit the number of steps per revolution
// for your motor
// initialize the stepper library on pins 8 through 11:
Stepper myStepper(stepsPerRevolution, 8,9,10,11);
void setup() {
// set the speed at 60 rpm:
myStepper.setSpeed(600);
// initialize the serial port:
Serial.begin(9600);
}
void loop() {
// step one revolution in one direction:
Serial.println("clockwise");
myStepper.step(stepsPerRevolution);
delay(50);
}
circuit
I changed the order of the input pins, so it was less confusing
This motor is a bipolar-hybrid and must be driven by a chopper drive controller such as the 1063 - PhidgetStepper
Bipolar 1-Motor
Now, I have no clue what that means, but is the 298 a chopper drive controller?
It also says in the manual:
The acceleration of a stepper motor is an important consideration when driving a load. Setting the acceleration too
high can result in the motor stalling, especially with a heavy load.
This motor is a bipolar-hybrid and must be driven by a chopper drive controller such as the 1063 - PhidgetStepper
Bipolar 1-Motor
Now, I have no clue what that means, but is the 298 a chopper drive controller?
It also says in the manual:
The acceleration of a stepper motor is an important consideration when driving a load. Setting the acceleration too
high can result in the motor stalling, especially with a heavy load.
So that might be why it's not moving?
What I've found out, is that an chopper driver slowly turns on the current, so the motor gets and slowly "on". I talked to my teacher about it, and he says it's not that important.
The motor by the way, haven't any load on yet.
Grumpy_Mike:
// set the speed at 60 rpm:
This is way too fast.
Try dropping it to 1 RMP.
I tried to change it to 1 RPM, but nothing happens yet? Anyway, on the datasheet, there is written
What I've found out, is that an chopper driver slowly turns on the current, so the motor gets and slowly "on".
I don't know where you found that but it is wrong. What a chopper does is to turn on the current very quickly and then when the current reaches the required value it turns it off. It allows you to use a higher voltage for your motor so the current is in the coils quickly, but that current is limited so the motor does not overheat.
I talked to my teacher about it, and he says it's not that important.
Teachers are not what they used to be. Is the motor getting hot? It should be and if it is not it implies you have not got it or the driver connected correctly.
so I would not say that 60 RPM isn't to high.
So if you are that smart how come you haven't got the motor moving yet then?
A real schematic would really help, what you posted is next to useless as it doesn't tell anyone anything. Show a schematic with the connections you have used on the module. Post a photograph of what you have so we can check it against the schematic.
Maybe not, but the part I highlighted also talks a bout stalling if the acceleration is too high and I surmise that 0 to 60 in one go is too much acceleration.
@GrumpyMike, I have no idea what a chopper thingy is, and it doesn't matter here, but is a 298 one of those or not? The OP's post to the motor's documentation says pretty clearly that they recommend a particular driver. (Although I guess that could be marketing-speak?)
Grumpy_Mike
I may then have miss read something. .
The motor is not running or getting hot. It only says that "tick tick" sound, as before.
It was not to play smart or anything? I'll take a picture as soon as possible
JimboZA
I haven't thought of it, in that way. I don't think the 298 is an chopper driver.
I think you would prevent yourself a huge amount of mental effort and stress by just using the driver the motor manufacturer says you should be using.
From an interest and experience point of view, the experimenting is cool and great in the long run and kudos to you for your tenacity. In the short run you have a project to submit and you don't know the chance of success with your home-grown solution, which might in fact be a non-solution.
I'd be inclined to go with what the manufacturer says you should be doing, in the interests of getting your project in on time.....
No no by itself. You have to add a L297 to make it a chopping regulator.
The wiring looks fine as far as you can see. I am not sure about the enable signals at each end of the inputs.
The motor is on a quite big gear so make sure you are giving it enough time to see any movement.
Generally stepping motors tick like this when it is either wired wrong or there is not enough power to move it.
Does the frequency of the tick change with you changing the speed in the software?
Check that the motor coils are the right ones by testing that there is continuity between the two wires on each side. Remove any connection to the controller before checking the continuity.
Try swapping one or more motor wires around.
Well now. I think I owe you an update on how it's going.
First off, I changed the H-Bridge to an Big easy driver instead and I can now control the motors, which I could not before.
When my project is done, I will upload some pictures of the product.
They should be, but it might depend on the manufacturer. The L298 is an H-Bridge IC, but its entirely possibly some company is using those numbers for a different part, probably by coincidence if so.