Why not just use an equatorial mount and just one motor?
To avoid the need for an optical alignment scope and much quicker, theoretically.
Like all the best geek projects, I expect you would spend more time creating an automated setup than you would ever have spent doing it manually. That's not a reason not to do it, of course.
![]() That's what I'm afraid of and my experience to date... Fortunately this project can be built in stages - functional from the start.
That's what I'm afraid of and my experience to date... Fortunately this project can be built in stages - functional from the start.
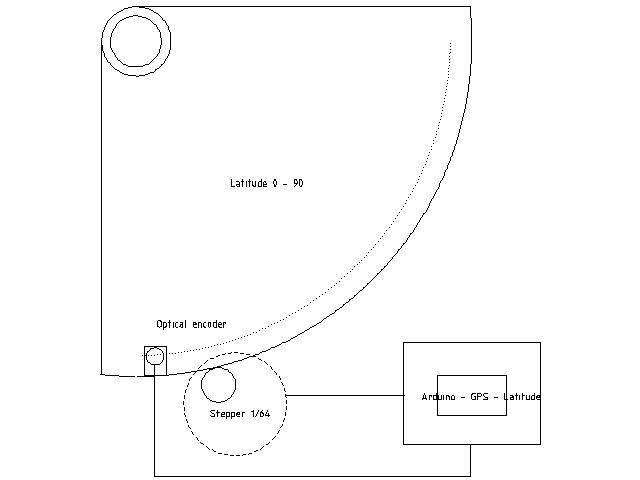
Will an encoder/GPS work in this configuration - a quadrant? I think the '0' end point would have to be calibrated at each set up, after leveling the device. Which might be simpler and more accurate than a graduated scale.
The stepper motor is one of those geared 1/64, 64 step 28Yxx 5v steppers of which there are thousands on ebay.