I've almost completed my project ![]()
I have one big problem to take take of:
Random i2c errors!
Sometimes I get them after 30 hours, sometimes after 40 minutes. Usually when a Wire.endTransmission() is happening.
After researching the forum I was sure Grumpy_Mike would come in here, insult my intelligence, and then tell me to decouple. (because he is so grumpy!)
I have been kind enough to save him the trouble! I have pre-insulted myself before posting this and will order a bunch of 100uF/25V capacitors.
But I'm not sure how many to put and where?
Guessing the minimum is 2 capacitors at the power supply?
The capacitors are inexpensive, I don't mind putting in many if it will help. I can put them at the power supply, before the RTC, in and out of Arduino, etc.
I also don't mind the idea of adding another power supply dedicated just to the stepper motor and/or Arduino. Wrapping cables in aluminum foil. Whatever makes the signal reliable.
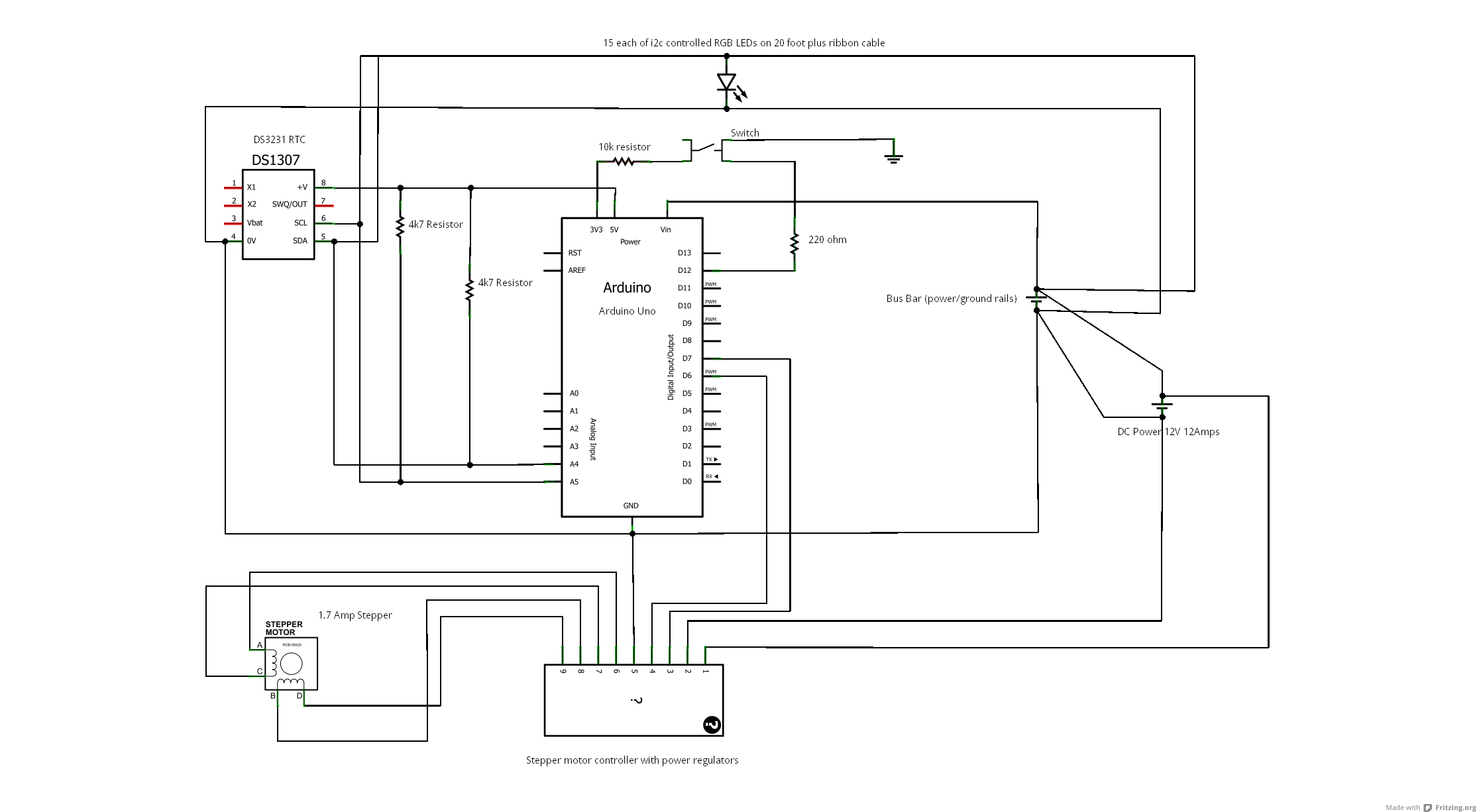
Below is the schematic.
Thanks for any help : )