I'm currently trying to improve my understanding of how drivers and motors interact and thought I had reached a point that was sufficient to get started with a project. While I was able to drive one motor without any difficulties, using a new stepper driver for another motor has led to that motor overheating. I have read through several similar topics, but unforunately still can't pinpoint where the problems in my case could arise (probably missing something very basic!). I'm still experimenting, but maybe someone here can spot a mistake more easily.
I started off by using "Motor A" and "Stepper Driver A" and never really ran into any significant temperatures - barely even warm, even after keeping the motor idle for longer sessions, which, if I recall correctly, should be most current consuming.
I then moved over to using "Motor B" and "Stepper Driver B" and could barely touch the motor after a couple of minutes. I was expecting that motor to build up more heat (due to higher phase resistance if that's right?) and tried to compare results by using "Motor A" with that driver, which led to comparably high temperatures.
I am currently not using microstepping and have tried matching the jumper settings to get the driver current as close as possible to the motor specs. Any ideas what that heat buildup could be due to? I was expecting both drivers to be quite comparable, judging by their specs.
Another thing that led to confusion was the current table on "Stepper Driver B", which mentions peak and RMS current values. Since I am using full steps I would take the peak values as reference, when microstepping the RMS values? Hope that's not too many stupid questions all in one go!
Does that stepper driver have a configurable (pre-configurable) current limit? Just got to make sure that the current through the motor coil isn't going above recommended levels for relatively long periods of time.
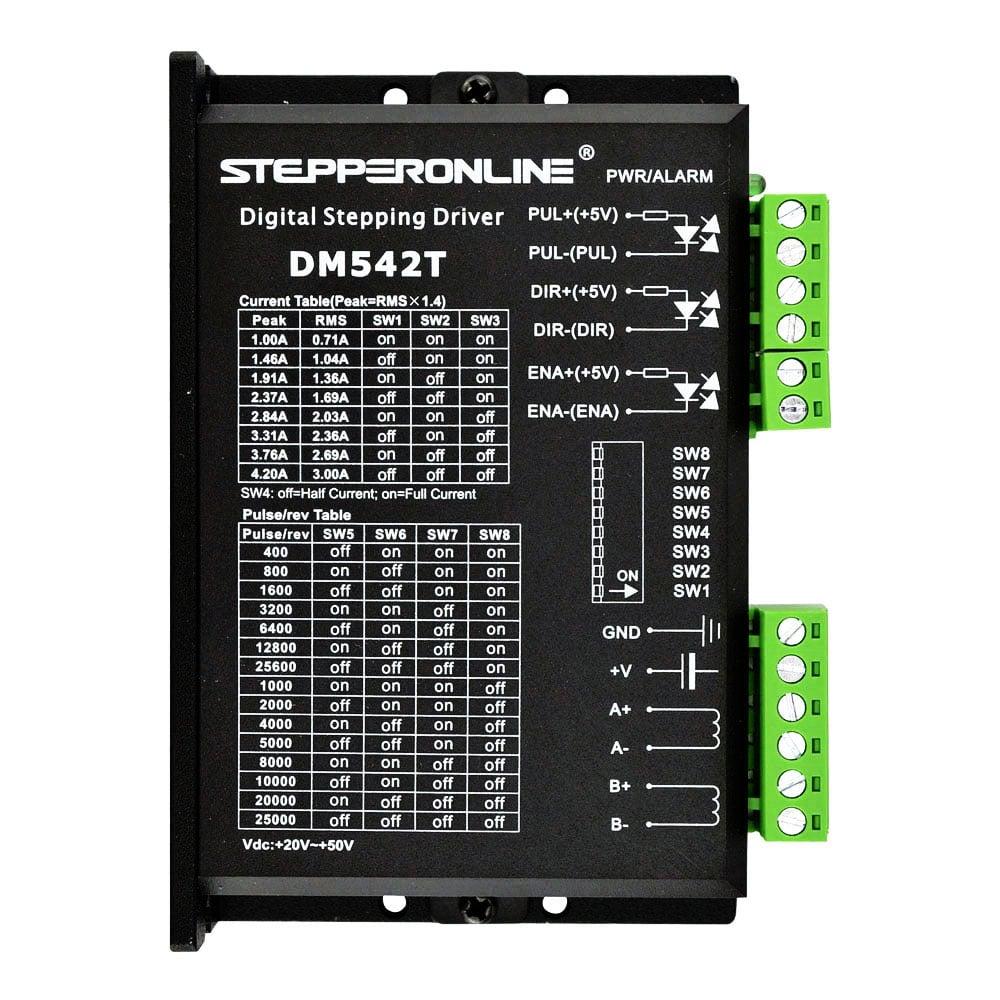
Do you mean the jumpers that can be set to adjust the current? I have been using the "Peak" table due to initially using full steps and adjusted the jumpers to get the current slightly below the motor specs. In the case of the 2.8A motor I adjusted them down to produce a peak current of 2.37A (SW1 - off, SW2 - off, SW3 - on, SW4 - on). Here is an image of the driver:
The 0.88A motor driven by 1A definitely makes sense. I have since switched the drivers.
Would you generally pick the closest rating below what the motor is designed to run at, no matter what? Even if that (in this case) meant dropping from 0.9A to 0.6A for the 0.88A motor?
That problem aside, I am still confused by the heat generation in the 2.8A motors. I did all my early experimenting with the max 3A driver (set to 3A - should have paid more attention to that too!) and the 2.8A motor never even turned noticably warm.
Now I am definitely planning on adjusting the current ratings down, but decided to compare the two drivers for a 15 minute idle session out of interest.
Driver A set to 3A - 2.8A motor - stays cold
Driver B set to 2.37A - same build 2.8A motor - turns warm (not hot, but definitely noticable)
Maybe I am missing something fundamental, but I just can't quite work out what that could be due to. Would that imply that one of the drivers is supplying more or the other driver less current than their jumper settings indicate?
The 0.88A motor driven by 1A definitely makes sense. I have since switched the drivers.
Would you generally pick the closest rating below what the motor is designed to run at, no matter what? Even if that (in this case) meant dropping from 0.9A to 0.6A for the 0.88A motor?
Maybe - that's only 4.5% more heat though.
That problem aside, I am still confused by the heat generation in the 2.8A motors. I did all my early experimenting with the max 3A driver (set to 3A - should have paid more attention to that too!) and the 2.8A motor never even turned noticably warm.
Bigger motor has a larger thermal time constant - will take much longer to reach operating temperature.
Now I am definitely planning on adjusting the current ratings down, but decided to compare the two drivers for a 15 minute idle session out of interest.
Some drivers reduce current on idle - run the motors at some slow constant step rate to compare
heat generation.
Driver A set to 3A - 2.8A motor - stays cold
Driver B set to 2.37A - same build 2.8A motor - turns warm (not hot, but definitely noticable)
Maybe I am missing something fundamental, but I just can't quite work out what that could be due to. Would that imply that one of the drivers is supplying more or the other driver less current than their jumper settings indicate?
Thanks, MarkT! That's definitely helped me learn a few things.
I also contacted the manufacturer and was told that I could simply trust the specs and settings on the drivers and shouldn't worry about varying heat generation. As you also mentioned, the inner workings of individual drivers vary (reducing current on idle etc.).
Here are two sentences from the mails with the manufacturer, which I thought were interesting. I'll leave them here, in case they're of use for someone:
"The current shown on the cover of st-7128 ("Stepper Driver A") is also peak current but the actual value is much smaller than what it shows."
"You can see when you set the current to be 2.37A peak on dm542t ("Stepper Driver B"), the motor will give out more torque than when you set 3A on st-7128 ("Stepper Driver A")"