I want to build a selfbalancing robot.
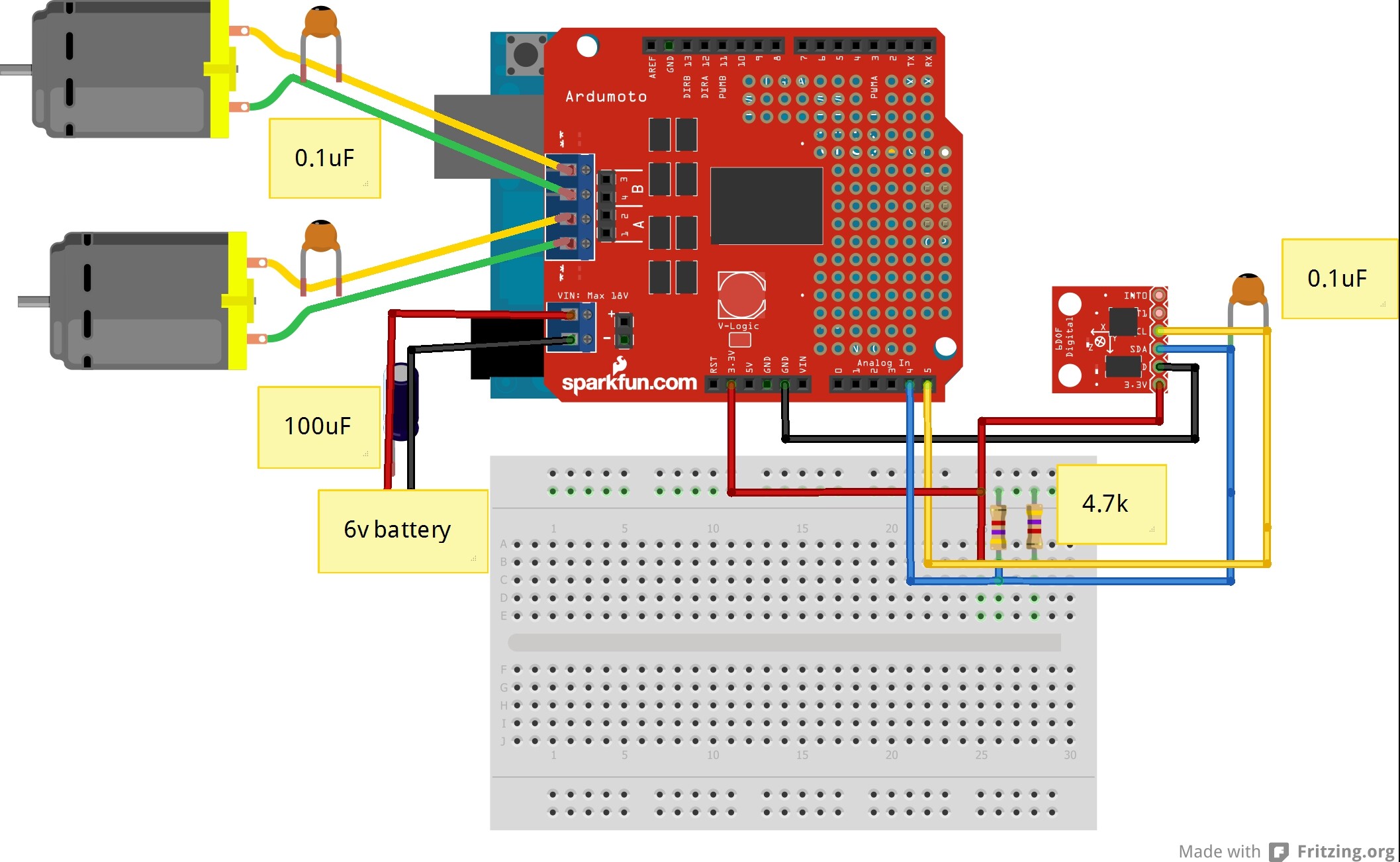
Therefore I use two DC motor, the Arduino Uno, the Arduino motor shield and an IMU (MPU6050).
The IMU works fine aslong the motors are disconneted.
But when I connect the motors to the circuit, the IMU stops working.
I tried already to use pull-up resistors and also some decoupling capacitors.
Has anyone an idea what I can change to get the robot working?