Hi all,
I'm hoping someone can assist me with a problem I am seeing when using a LTC1454 12-bit DAC IC, with the Arduino (DUE) and the SPI bus.
This IC is a dual-output DAC, with data being sent to the chip over SPI as a 24-bit word. I have worked out a few phase-shifted sine tables in excel, and equated the corresponding bytes to send to the DAC to acheive this outputs. The code below shows these tables as a 2-dimensional, 360 point array.
I know I have configured the SPI bus correctly, as I am able to obtain a sine wave on the output of DAC-B of the IC. The code (below) shows a "for" loop, that steps through the same sine table for each DAC, however, the output of DAC-A appears to be corrupted on my scope trace!
That is to say, DAC-A and DAC-B are both being fed the same 12-bit words (I think!), but DAC-A appears to be receiving something different than expected. A screenshot below demonstrates what I am seeing, DAC-A is the high trace, DAC-B is below.
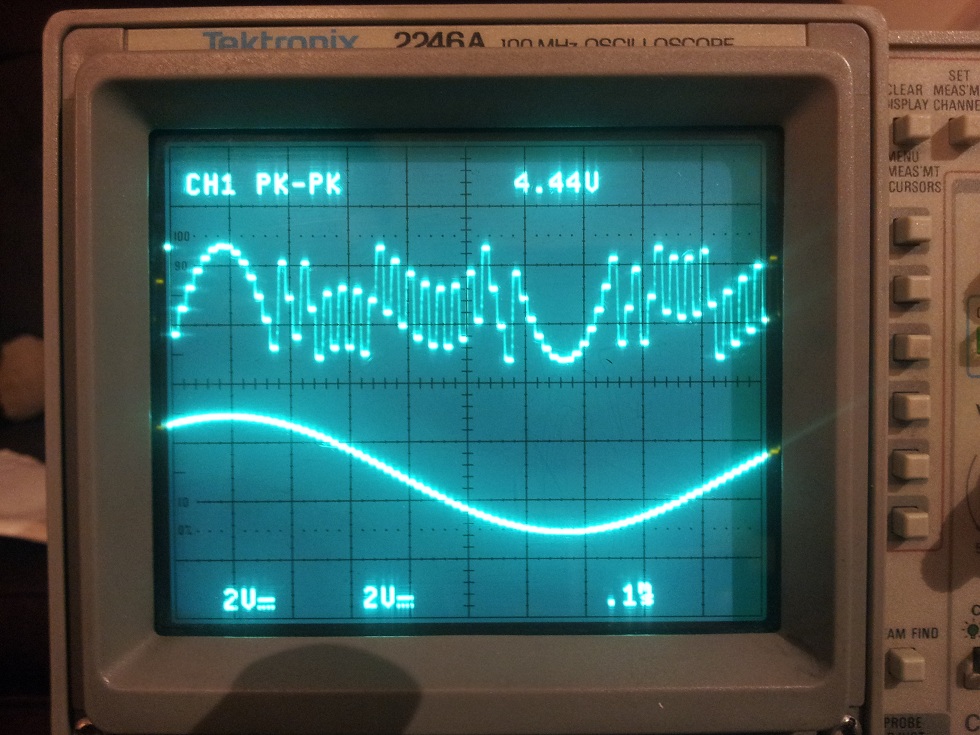
This looks like data courruption, rather than electrical clipping of the output, which is odd, as the code should be passing exactly the same words to each DAC register. I'm beginning to think I'm missing something pretty obvious in regard to timing or such, but I have poured over the datasheet and application note for this part for a few hours now, and I still can't see what it is I'm missing!
I would be incredibly grateful if one of you fine people could point out the silly mistake I'm making, or for any advice / input on this matter!
Kind regards,
Tom
Here's my code; some things to note are;
- I'm using the extended SPI functionality provided by the DUE, in case anyone is wondering about the extra argument in SPI.transfer
- I'm pretty sure the bitMath involved in the feedback portion of the code is not correct, but it is representative of the scope trace when graphed, and I'm too frustrated to improve upon it right now I'm afraid!
// Name:Driver
// Version A 0.1
// Tom Fleet, Jan, 2013
// Board Type: Arduino DUE (SAM3 Core)
// Description:
// Uses 2, dual 12-bit DAC's (LTC1454's) and 3 phase-shifted sine look-up tables.
// The lookup values are paased to the DAC's through the DUE's extended SPI interface.
#include <SPI.h>
#define LT1454_CS 4 //LT1454 Chip Sel Pin.
#define LT1454_CLR 5 //LT1454 CLR Pin.
#define button 53 //Active low tactile switch on digital pin 53, for manual stepping.
#define DEBUG 0 //debug flag to enable Serial output, etc.
//12 bit Sine LUT.
const int sine1Hex[2][360] = {// Table 1: Phase Shift = 0 degrees.
//sineHex[0] = MSB,
//sineHex[1] = LSB
{0x08,0x08,0x08,0x08,0x08,0x08,0x08,0x09,0x09,0x09,0x09,0x09,0x09,0x09,0x0A,0x0A,0x0A,0x0A,0x0A,0x0A,0x0A,0x0A,0x0B,0x0B,0x0B,0x0B,0x0B,0x0B,0x0B,0x0B,0x0C,0x0C,0x0C,0x0C,0x0C,0x0C,0x0C,0x0C,0x0D,0x0D,0x0D,0x0D,0x0D,0x0D,0x0D,0x0D,0x0D,0x0D,0x0E,0x0E,0x0E,0x0E,0x0E,0x0E,0x0E,0x0E,0x0E,0x0E,0x0E,0x0E,0x0E,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0F,0x0E,0x0E,0x0E,0x0E,0x0E,0x0E,0x0E,0x0E,0x0E,0x0E,0x0E,0x0E,0x0E,0x0D,0x0D,0x0D,0x0D,0x0D,0x0D,0x0D,0x0D,0x0D,0x0D,0x0C,0x0C,0x0C,0x0C,0x0C,0x0C,0x0C,0x0C,0x0B,0x0B,0x0B,0x0B,0x0B,0x0B,0x0B,0x0B,0x0A,0x0A,0x0A,0x0A,0x0A,0x0A,0x0A,0x0A,0x09,0x09,0x09,0x09,0x09,0x09,0x09,0x08,0x08,0x08,0x08,0x08,0x08,0x08,0x07,0x07,0x07,0x07,0x07,0x07,0x07,0x07,0x06,0x06,0x06,0x06,0x06,0x06,0x06,0x05,0x05,0x05,0x05,0x05,0x05,0x05,0x05,0x04,0x04,0x04,0x04,0x04,0x04,0x04,0x03,0x03,0x03,0x03,0x03,0x03,0x03,0x03,0x03,0x02,0x02,0x02,0x02,0x02,0x02,0x02,0x02,0x02,0x02,0x01,0x01,0x01,0x01,0x01,0x01,0x01,0x01,0x01,0x01,0x01,0x01,0x01,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x01,0x01,0x01,0x01,0x01,0x01,0x01,0x01,0x01,0x01,0x01,0x01,0x01,0x02,0x02,0x02,0x02,0x02,0x02,0x02,0x02,0x02,0x02,0x03,0x03,0x03,0x03,0x03,0x03,0x03,0x03,0x03,0x04,0x04,0x04,0x04,0x04,0x04,0x04,0x05,0x05,0x05,0x05,0x05,0x05,0x05,0x05,0x06,0x06,0x06,0x06,0x06,0x06,0x06,0x07,0x07,0x07,0x07,0x07,0x07,0x07,0x07},
{0x23,0x46,0x6A,0x8E,0xB1,0xD5,0xF9,0x1C,0x3F,0x63,0x86,0xA9,0xCC,0xEE,0x11,0x33,0x56,0x78,0x9A,0xBB,0xDD,0xFE,0x1F,0x40,0x60,0x81,0xA1,0xC0,0xE0,0xFF,0x1E,0x3C,0x5A,0x78,0x95,0xB2,0xCF,0xEC,0x8,0x23,0x3E,0x59,0x73,0x8D,0xA7,0xC0,0xD8,0xF1,0x8,0x1F,0x36,0x4C,0x62,0x77,0x8C,0xA0,0xB4,0xC7,0xDA,0xEC,0xFE,0xF,0x1F,0x2F,0x3F,0x4D,0x5C,0x69,0x77,0x83,0x8F,0x9A,0xA5,0xAF,0xB9,0xC2,0xCA,0xD2,0xD9,0xDF,0xE5,0xEB,0xEF,0xF3,0xF7,0xFA,0xFC,0xFD,0xFE,0xFF,0xFE,0xFD,0xFC,0xFA,0xF7,0xF3,0xEF,0xEB,0xE5,0xDF,0xD9,0xD2,0xCA,0xC2,0xB9,0xAF,0xA5,0x9A,0x8F,0x83,0x77,0x69,0x5C,0x4D,0x3F,0x2F,0x1F,0xF,0xFE,0xEC,0xDA,0xC7,0xB4,0xA0,0x8C,0x77,0x62,0x4C,0x36,0x1F,0x8,0xF1,0xD8,0xC0,0xA7,0x8D,0x73,0x59,0x3E,0x23,0x8,0xEC,0xCF,0xB2,0x95,0x78,0x5A,0x3C,0x1E,0xFF,0xE0,0xC0,0xA1,0x81,0x60,0x40,0x1F,0xFE,0xDD,0xBB,0x9A,0x78,0x56,0x33,0x11,0xEE,0xCC,0xA9,0x86,0x63,0x3F,0x1C,0xF9,0xD5,0xB1,0x8E,0x6A,0x46,0x23,0xFF,0xDB,0xB8,0x94,0x70,0x4D,0x29,0x5,0xE2,0xBF,0x9B,0x78,0x55,0x32,0x10,0xED,0xCB,0xA8,0x86,0x64,0x43,0x21,0x0,0xDF,0xBE,0x9E,0x7D,0x5D,0x3E,0x1E,0xFF,0xE0,0xC2,0xA4,0x86,0x69,0x4C,0x2F,0x12,0xF6,0xDB,0xC0,0xA5,0x8B,0x71,0x57,0x3E,0x26,0xD,0xF6,0xDF,0xC8,0xB2,0x9C,0x87,0x72,0x5E,0x4A,0x37,0x24,0x12,0x0,0xEF,0xDF,0xCF,0xBF,0xB1,0xA2,0x95,0x87,0x7B,0x6F,0x64,0x59,0x4F,0x45,0x3C,0x34,0x2C,0x25,0x1F,0x19,0x13,0xF,0xB,0x7,0x4,0x2,0x1,0x0,0x0,0x0,0x1,0x2,0x4,0x7,0xB,0xF,0x13,0x19,0x1F,0x25,0x2C,0x34,0x3C,0x45,0x4F,0x59,0x64,0x6F,0x7B,0x87,0x95,0xA2,0xB1,0xBF,0xCF,0xDF,0xEF,0x0,0x12,0x24,0x37,0x4A,0x5E,0x72,0x87,0x9C,0xB2,0xC8,0xDF,0xF6,0xD,0x26,0x3E,0x57,0x71,0x8B,0xA5,0xC0,0xDB,0xF6,0x12,0x2F,0x4C,0x69,0x86,0xA4,0xC2,0xE0,0xFF,0x1E,0x3E,0x5D,0x7D,0x9E,0xBE,0xDF,0x0,0x21,0x43,0x64,0x86,0xA8,0xCB,0xED,0x10,0x32,0x55,0x78,0x9B,0xBF,0xE2,0x5,0x29,0x4D,0x70,0x94,0xB8,0xDB,0xFF}
};
//NOTE; There are 2 more LUT's in the actual code, phase shifted by 120* each. They are omitted here (as I'm not using them, and they exceed the 9500 char forum post limit!) :relaxed:
int feedback1,feedback2,feedback3,feedback4;
const int step = 4;
void setup()
{
Serial.begin(9600);
//Set Pin Modes.
pinMode(LT1454_CLR,OUTPUT);
pinMode(button,INPUT);
//clear values stored in DAC's. LT1454_CLR pin is active LOW.
digitalWrite(LT1454_CLR,LOW);
delay(10);
digitalWrite(LT1454_CLR,HIGH);
//SPI Init.
SPI.begin(LT1454_CS); // Setup SPI to use pin 4 as CS.
SPI.setBitOrder(MSBFIRST);
SPI.setDataMode(LT1454_CS,3); // Use SPI Mode 3 (CPOL = 1, CPHA = 1)
SPI.setClockDivider(LT1454_CS, 21); // Set SPI Clock divider to 21.(4MHz)
}
void loop()
{
// SPI Method = byte placeholder = SPI.transfer(CS Pin, byte,SPI_CONTINUE); for successive bytes.
// Use SPI.transfer(CS Pin, byte,SPI_LAST) to terminate trasmission and send CS High.
// LT1454 Packet is 24 bits, 12 bits per channel, A, then B, MSB First.
// Data is latched on rising edge of clock.
// So, CPOL = 1(?), CPHA = 1, so mode = 3
for (int i = 0; i < 360; i+=step)
{
byte discard; //Unidirectional SPI, anything returned would be 0xFF. So get rid of it.
byte feedback; //we can debug using the serial out of the chip / chain, to see what's being courrupted in DAC A.
//channel D + C not implimented currently.
//Channel B
feedback1 = SPI.transfer(LT1454_CS, sine1Hex[0][i],SPI_CONTINUE); //transfer high_byte, channel B
feedback2 = SPI.transfer(LT1454_CS, sine1Hex[1][i],SPI_CONTINUE); //transfer low_byte, channel B
//Channel A
feedback3 = SPI.transfer(LT1454_CS, sine1Hex[0][i],SPI_CONTINUE); //transfer high_byte, channel A
feedback4 = SPI.transfer(LT1454_CS, sine1Hex[1][i],SPI_LAST); //transfer low_byte, channel A
if(DEBUG)
{
Serial.print((feedback1 << 4) + feedback2); //pretty sure this is buggy, but is representative of scope traces when graphed.
Serial.print("\t");
Serial.println((feedback3 << 4) + feedback4);
}
//delayMicroseconds(100); //delay for readability in terminal
//while(digitalRead(button)){;}//wait for button low before stepping
}
}