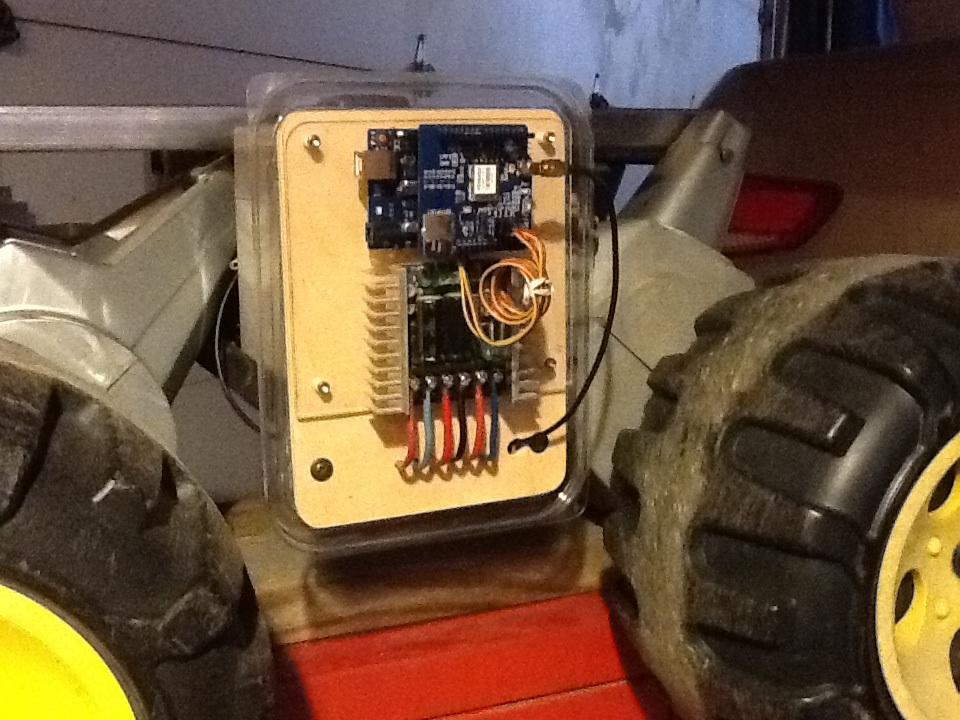
I have a differential drive project I made from recycled Powerwheel units. I was using R/C equipment with a
Sabertooth 2X25 to test / design it.I would like to install an Uno with GPS shield and a bluetooth shield that
would communicate with my cell phone to allow the vehicle to follow me as I walk my property. I have seen
similar projects that uses a compass along with the GPS to follow a predetermined course. Would a compass be necessary in my project?
trljb:
I have a differential drive project I made from recycled Powerwheel units. I was using R/C equipment with a
Sabertooth 2X25 to test / design it.I would like to install an Uno with GPS shield and a bluetooth shield that
would communicate with my cell phone to allow the vehicle to follow me as I walk my property. I have seen
similar projects that uses a compass along with the GPS to follow a predetermined course. Would a compass be necessary in my project?
I am trying to use similar technology and from my research I have found that GPS signal has no way of interpreting orientation...http://arduino.cc/forum/index.php/topic,149410.0.html
How do you plan to communicate and find the distance between you and your bot? I am beginning to feel an ultrasonic/bluetooth triangulation solution will be easier to implement :~
Rob.
I have found that GPS signal has no way of interpreting orientation.
Strange. Mine has no problem at all telling which way I am going. Strolling around the yard, maybe. At any decent speed, it works fine. It, of course, determines direction from adjacent location data, so if the locations are very close together (walking speed), direction is not going to be accurate. If the adjacent locations are far enough apart, direction IS meaningful.
But, in order for a robot to follow a person, using GPS, both the robot and the person need GPS units AND the person needs to communication his/her location to the robot. Given the typical accuracy of GPS, using two different units for following would work fine, if you don't need the robot to stay real close and you don't mind running around the yard at 30 mph.
Strange. Mine has no problem at all telling which way I am going.
Apples vs. oranges. Orientation and direction of travel are two things.
Help! After trying every conceivable combination without success, I find myself completely dazed and confused. My gps shield module board V2.1 EB-5365 SD works great on my UNO R3. I cannot get the Stackable BT Shield for Arduino Freduino Support to respond with any approach. The BT shield needs to be stacked between the UNO and the GPS shield so that I can plug the Sabertooth 2X25 into the S+G ports on GPS shield. Elecfreaks has been AWOL for advice. I have watched countless videos ( none using my particular shield - could not find one ) and many hours reading and rereading the Elecfreaks Wiki page ( broken English adds to my confusion ). The BT does power up. If someone could ( in clear english ) suggest something very simple to accomplish so as to regain my confidence, I could then reapply myself to this task. My goal is to walk behind my bot, logging way points for future reference, using my iPhone 3 to guide it.

Before taking a hammer to everything, I decided to take the 'monkey at the keyboard' approach, and voila! I am receiving GPS data on my 'droid! Previous projects using my Sabertooth 2X25 were controlled with a Skyfly R/C unit. I am wanting to adapt the UNO/Bluetooth/GPS unit to the Sabertooth 2X25. The GPS shield has four (4) of the G+S ports, just like the R/C reciever. I would like to utilize those connections so that I could quickly switch back to the R/C system if the need arises. The Sabertooth library uses the Tx pin. I would love to be able to figure this out on my own, but I need someone to give me a (few) hint(s) as to the direction to head in. Or, in a few weeks I can again consider the 'hammer' 'monkey' option. Thanks!