Hi, Im new to programming and electronics so please be patient with my question and code in general. There's a lot I learnt through these forums and generally I strive to resolve issues with this minimal understanding of concepts, though here I need your help or suggestion with my new project.
This is a GPS speedometer with follwing constituents:
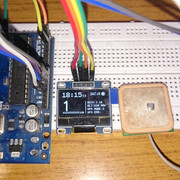
Arduino UNO
Generic 128x64 OLED display
GY-NEO6MV2 GPS Module
The configuration is as follows:
OLED
VCC --> +5V (Arduino)
GND --> GND
SDA --> A4
SCL --> A5
GPS
VCC --> +3.3V (Arduino)
GND --> GND
TXD --> 4
RXD --> 3
As I type this, I believe the hardware is configured correctly, please advice if otherwise. Following is the sketch from Arduino
#include <TinyGPS++.h>
#include <SoftwareSerial.h>
#include "U8glib.h"
#define OLED_RESET 4
U8GLIB_SSD1306_128X64 u8g(U8G_I2C_OPT_NONE | U8G_I2C_OPT_DEV_0); // I2C / TWI
static const int RXPin = 4, TXPin = 3;
static const int GPSBaud = 9600;
const int timezonehr = +5; //Timezone hour offset
const int timezonemn = 30; //Timezone minute offset
int hr;
int mn;
// The TinyGPS++ object
TinyGPSPlus gps;
// TinyGPSPlus Custom Elements
TinyGPSCustom pdop(gps, "GPGSA", 15); // $GPGSA sentence, 15th element
TinyGPSCustom hdop(gps, "GPGSA", 16); // $GPGSA sentence, 16th element
TinyGPSCustom vdop(gps, "GPGSA", 17); // $GPGSA sentence, 17th element
TinyGPSCustom GPSMode(gps, "GPGSA", 2); // GPSMode over Ground
TinyGPSCustom GPSHorPosError(gps, "GPRME", 15); // GPS Data Check
TinyGPSCustom Altitude(gps, "GPGGA", 9); // Antenna Altitude above mean Sea level
// The serial connection to the GPS device
SoftwareSerial ss(RXPin, TXPin);
// Display This section will contain elements for the OLED
void draw(void) {
// graphic commands to redraw the complete screen should be placed here
//Seperator (Vertical Line)
u8g.drawLine(69,27,69,64);
//GPS:: Checks if GPS has valid fix, then display selective elements
if (gps.location.isValid()){
u8g.drawCircle(122,5,5, U8G_DRAW_ALL); // GPS fix circle Top Right
u8g.drawDisc(122,5,3, U8G_DRAW_ALL);
}
else{
u8g.drawCircle(122,5,5, U8G_DRAW_ALL);
}
u8g.setFont(u8g_font_profont12);
u8g.setPrintPos(78, 9);
u8g.print(" SAT:"); u8g.print(gps.satellites.value());
//TIME:: Time Elements including conversion of UTC to Local (IST +5.30)
u8g.setFont(u8g_font_profont22r);
u8g.setPrintPos(0, 14);
hr = gps.time.hour();
mn = gps.time.minute();
mn = mn + timezonemn; //Add The Minute Time Zone Offset
if (mn > 59) { //If The Minute Is Over 59 (From The Time Zone Conversion)
mn = mn - 60; //Subtract 60 From It
hr = hr + 1; //Then Add 1 To The Hour
}
else {
if (mn < 0) { //If Minute Is Less Than 0, Do The Inverse Of Above
mn = mn + 60;
hr = hr - 1;
}
}
hr = hr + timezonehr; //Add The Hour Time Zone Offset
if (hr > 23) { //Do The Same Thing We Did Above
hr = hr - 24;
}
else {
if (hr < 0) {
hr = hr + 24;
}
}
if (hr < 10) u8g.print('0'); u8g.print(hr); u8g.print(":"); if (mn < 10) u8g.print('0'); u8g.print(mn); u8g.setFont (u8g_font_courR08r); u8g.print(""); if (gps.time.second() < 10) u8g.print('0');u8g.print(gps.time.second()); // u8g.print(" "); if (gps.date.day() < 10) u8g.print('0'); u8g.print(gps.date.day());
u8g.setPrintPos(44, 11);
//SPEED:: Displays Speed and other related graphics
//u8g.drawBox(0,20,(gps.speed.kmph()+0),8);
u8g.drawFrame(2,59,48,4);
u8g.drawBox(2,59,((gps.speed.kmph()+0)/2.5),4);
if ((gps.speed.kmph()) > 100)
{
u8g.drawBox(2,22,63,35);
u8g.setColorIndex(0);
u8g.setFont(u8g_font_fur30n);
u8g.setPrintPos(4, 55);
u8g.print(gps.speed.kmph(),0);
}
else
{
u8g.setFont(u8g_font_fur30n);
u8g.setPrintPos(0, 56);
u8g.print(gps.speed.kmph(),0);
}
u8g.setColorIndex(1);
u8g.setFont(u8g_font_orgv01r);
u8g.setPrintPos(0, 22);
//u8g.print("SPEED >>");
u8g.setFont(u8g_font_fur30n);
u8g.setPrintPos(0, 56);
u8g.print(gps.speed.kmph(),0);
u8g.setFont(u8g_font_orgv01r);
u8g.setPrintPos(53, 64);
u8g.print("KM");
//GPS DATA:: Other GPS related data and statistics
u8g.setFont(u8g_font_profont10r);
u8g.setPrintPos(75, 34); u8g.print("ACCU:");u8g.print(hdop.value());
u8g.setPrintPos(75, 44); u8g.print("ALT:"); u8g.print(gps.altitude.meters()); u8g.print("m");
u8g.setPrintPos(75, 54); u8g.print("GPS MODE:"); u8g.print(GPSMode.value());
u8g.setPrintPos(75, 64); u8g.print("GPS ERR:"); u8g.print(GPSHorPosError.value());
}
void setup()
{
Serial.begin(115200);
ss.begin(GPSBaud);
Serial.println(F("UsingCustomFields.ino"));
Serial.println(F("Demonstrating how to extract any NMEA field using TinyGPSCustom"));
Serial.print(F("Testing TinyGPS++ library v. ")); Serial.println(TinyGPSPlus::libraryVersion());
Serial.println(F("by Mikal Hart"));
Serial.println();
}
void loop()
{
// Every time anything is updated, print everything.
if (gps.altitude.isUpdated() || gps.satellites.isUpdated() ||
pdop.isUpdated() || hdop.isUpdated() || vdop.isUpdated() || gps.speed.isUpdated() ||
GPSMode.isUpdated() || GPSHorPosError.isUpdated() || Altitude.isUpdated())
{
Serial.println(F(""));
Serial.print(F("ALT=")); Serial.print(gps.altitude.meters());
Serial.print(F(" PDOP=")); Serial.print(pdop.value());
Serial.print(F(" HDOP=")); Serial.print(hdop.value());
Serial.print(F(" VDOP=")); Serial.print(vdop.value());
Serial.print(F(" SATS=")); Serial.print(gps.satellites.value());
Serial.print(F(" Altitude=")); Serial.print(gps.altitude.meters());
Serial.print(F(" GPS Mode=")); Serial.print(GPSMode.value());
Serial.print(F(" GPS Data=")); Serial.print(GPSHorPosError.value());
Serial.print(F(" TIME=")); Serial.print(hr); Serial.print(mn); Serial.print(gps.time.second());
}
while (ss.available() > 0)
gps.encode(ss.read());
// This code was repeated because the GPS data would otherwise take about a minute to update on OLED even without Mode 3 Fix.
// I believe this forces the page to be recreated whenever a component is updated.
if (gps.altitude.isUpdated() || gps.satellites.isUpdated() ||
pdop.isUpdated() || hdop.isUpdated() || vdop.isUpdated() || gps.speed.isUpdated() ||
GPSMode.isUpdated() || GPSHorPosError.isUpdated() || Altitude.isUpdated() || gps.time.isUpdated())
{
{
u8g.firstPage();
do{
draw();
}
while(u8g.nextPage());
}
}
}
Issue: The GPS seems receive satellite data and after a few seconds establishes a Mode 1 fix. Things work fine untill this moment, the Speed is updated and displays acceptable values. However once the GPS establishes a 3D fix, the Speed data is updated about once a minute. I chose to display seconds on the display precisely to figure out when the data on the display becomes stagnant.
Once the code is uploaded to the arduino and the GPS goes through a cold start (powered fresh) the serial port updates occour fast, and usually they retain their interval of about once a second, but sometimes gradually slows down as the GPS accumulates more prcise fix, the updates begin to slumber untill a point where they seem to stall or occour about once a minute sometimes even more. This however defeats the intended purpose of a speedometer. Irrespective of the serial port data updates, the OLED display data essentially stalls for about a minute once on a 3D fix.
Please check the attached image for reference
The serial port data (at arbitrary interval. please note that even though the updates over the serial port were regular, the OLED display reflected a change once a minute:
ALT=204.30 PDOP=3.14 HDOP=1.48 VDOP=2.76 SATS=4 Altitude=204.30 GPS Mode=3 GPS Data= TIME=1940
ALT=204.30 PDOP=3.14 HDOP=1.48 VDOP=2.76 SATS=4 Altitude=204.30 GPS Mode=3 GPS Data= TIME=1940
ALT=204.30 PDOP=3.14 HDOP=1.48 VDOP=2.76 SATS=4 Altitude=204.30 GPS Mode=3 GPS Data= TIME=1940
I hope i have rendered the issue correctly and I shall be glad if anyone is willing to help resolve it.
Thanks.