Hello All
@vinceherman : yes you were right! we used 2 but they failed again.
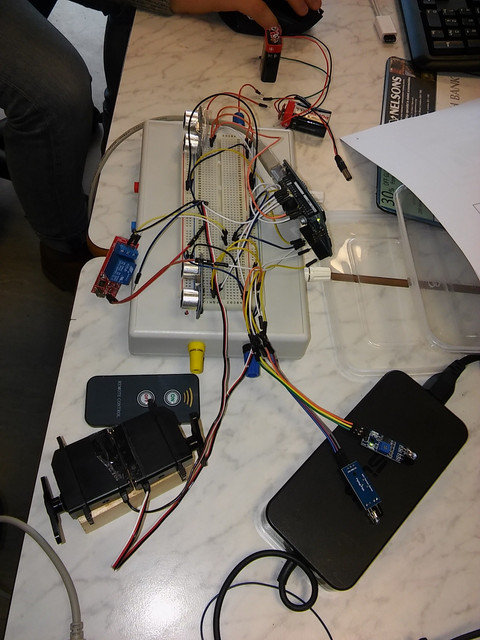
Here is the code and a pic of the setup which we are trying to make the robot based on.
Which battery you suggest?
What do you think about the code?
How to improve it all in your professional opinion?
#include <Servo.h>
Servo myservoR;
Servo myservoL;
const int trigPin = 2;
const int echoPin = 4;
const int trigPin2 = 13;
const int echoPin2 = 12;
int irsens = A0;
int irsens2 = A5;
void setup() {
// put your setup code here, to run once:
pinMode (A0, INPUT);
pinMode (A5, INPUT);
Serial.begin (9600);
pinMode (trigPin, OUTPUT);
pinMode (echoPin, INPUT);
pinMode (trigPin2, OUTPUT);
pinMode (echoPin2, INPUT);
myservoR.attach(9);
myservoL.attach(11);
Serial.begin (9600);
}
void loop() {
// put your main code here, to run repeatedly:
if (analogRead(A0) <900)
{
myservoR.write(180);
myservoL.write(0);
delay(5000);
}
else
{
}
if (analogRead(A5) <900)
{
myservoR.write(0);
myservoL.write(180);
delay(5000);
}
else
{
}
long duration, cm;
digitalWrite (trigPin, LOW);
delayMicroseconds (2);
digitalWrite (trigPin, HIGH);
delayMicroseconds (10);
digitalWrite (trigPin, LOW);
pinMode (echoPin, OUTPUT);
digitalWrite (echoPin, LOW);
pinMode (echoPin, INPUT);
duration = pulseIn (echoPin, HIGH);
cm = (duration/2)/29;
long duration2, cm2;
digitalWrite (trigPin2, LOW);
delayMicroseconds (2);
digitalWrite (trigPin2, HIGH);
delayMicroseconds (10);
digitalWrite (trigPin2, LOW);
pinMode (echoPin2, OUTPUT);
digitalWrite (echoPin2, LOW);
pinMode (echoPin2, INPUT);
duration2 = pulseIn (echoPin2, HIGH);
cm2 = (duration2/2)/29;
Serial.print ("trackSensF = ");
Serial.print (analogRead(A0));
//delay (100);
Serial.print ("\t trackSensB = ");
Serial.print (analogRead(A5));
//delay (100);
Serial.print ("\t cm= ");
Serial.print (cm);
//delay(100);
Serial.print ("\t cm2= ");
Serial.println (cm2);
//delay(100);
//--------------------
if (cm > 5) {
myservoR.write(0);
// myservoL.write(50);
delay(15);
}
else {
myservoR.write(180);
// myservoL.write(180);
}
if (cm2 > 5) {
// myservoR.write(30);
myservoL.write(0);
delay(15);
}
else {
// myservoR.write(180);
myservoL.write(180);
}
}