Hi , all
I tried to use Gobetwino for collecting data in Txt. file by combining code for arduino with code of Gobetwino, but it didn't work. So hope anyone could help me with this please. It is my final year project.
#include <string.h> //Use the string Library
#include <ctype.h>
#include <EEPROM.h>
#define PINEN 7 //Mux Enable pin
#define PINA0 4 //Mux Address 0 pin
#define PINA1 5 //Mux Address 1 pin
#define PINA2 6 //Mux Address 2 pin
#define PINSO 12 //TCAmp Slave Out pin (MISO)
#define PINSC 13 //TCAmp Serial Clock (SCK)
#define PINCS 9 //TCAmp Chip Select Change this to match the position of the Chip Select Link
unsigned int Temp[8], SensorFail[8];
unsigned int Mask;
//char data[16];
char i, j, NumSensors =1, UpdateDelay;
char Rxchar, Rxenable, Rxptr, Cmdcomplete, R;
char Rxbuf[15];
char adrbuf[3], cmdbuf[3], valbuf[12];
int val = 0, Param;
unsigned long time;
int serInLen = 25;
char serInString[25];
void setup()
{
Serial.begin(9600);
Serial.println("TCMUX");
if (EEPROM.read(511)==1)
{
NumSensors = EEPROM.read(0);
UpdateDelay = EEPROM.read(1);
}
pinMode(PINEN, OUTPUT);
pinMode(PINA0, OUTPUT);
pinMode(PINA1, OUTPUT);
pinMode(PINA2, OUTPUT);
pinMode(PINSO, INPUT);
pinMode(PINCS, OUTPUT);
pinMode(PINSC, OUTPUT);
digitalWrite(PINEN, HIGH); // enable on
digitalWrite(PINA0, LOW); // low, low, low = channel 1
digitalWrite(PINA1, LOW);
digitalWrite(PINA2, LOW);
digitalWrite(PINSC, LOW); //put clock in low
Serial.println("#S|CPTEST|[]#");
}
void loop()
{
if (millis() > (time + ((unsigned int)UpdateDelay*1000)))
{
time = millis();
//for(j=0;j<NumSensors;j++)
//{
if (j<(NumSensors-1)) j++;
else j=0;
switch (j) //select channel
{
case 0:
digitalWrite(PINA0, LOW);
digitalWrite(PINA1, LOW);
digitalWrite(PINA2, LOW);
break;
case 1:
digitalWrite(PINA0, HIGH);
digitalWrite(PINA1, LOW);
digitalWrite(PINA2, LOW);
break;
case 2:
digitalWrite(PINA0, LOW);
digitalWrite(PINA1, HIGH);
digitalWrite(PINA2, LOW);
break;
case 3:
digitalWrite(PINA0, HIGH);
digitalWrite(PINA1, HIGH);
digitalWrite(PINA2, LOW);
break;
case 4:
digitalWrite(PINA0, LOW);
digitalWrite(PINA1, LOW);
digitalWrite(PINA2, HIGH);
break;
case 5:
digitalWrite(PINA0, HIGH);
digitalWrite(PINA1, LOW);
digitalWrite(PINA2, HIGH);
break;
case 6:
digitalWrite(PINA0, LOW);
digitalWrite(PINA1, HIGH);
digitalWrite(PINA2, HIGH);
break;
case 7:
digitalWrite(PINA0, HIGH);
digitalWrite(PINA1, HIGH);
digitalWrite(PINA2, HIGH);
break;
}
delay(5);
digitalWrite(PINCS, LOW); //stop conversion
delay(5);
digitalWrite(PINCS, HIGH); //begin conversion
delay(250); //wait 250 ms for conversion to complete
digitalWrite(PINCS, LOW); //stop conversion, start serial interface
delay(1);
Temp[j] = 0;
for (i=15;i>=0;i--)
{
digitalWrite(PINSC, HIGH);
delay(1);
/if (digitalRead(PINSO)==1)
{
//Temp[j] += Mask;
Serial.print("1");
}
else
{
Serial.print("0");
}/
if ((i<15) && (i>2))
{
Mask = 1<<(i-3);
if (digitalRead(PINSO)==1)
{
Temp[j] += Mask;
//Serial.print("1");
}
else
{
// Serial.print("0");
}
}
if (i==2)
{
SensorFail[j] = digitalRead(PINSO);
}
digitalWrite(PINSC, LOW);
delay(1);
//delay(1);
}
//Serial.println();
//Serial.println(Temp,BIN);
//Serial.print("#");
//Serial.print(j+1,DEC);
// Serial.print(": ");
if (SensorFail[j] == 1)
{
Serial.println("FAIL");
}
else
{
Serial.print(Temp[j]>>2);
Serial.print(".");
if ((Temp[j] & 0b11) == 0b00)
{
Serial.print("00");
}
if ((Temp[j] & 0b11) == 0b01)
{
Serial.print("25");
}
if ((Temp[j] & 0b11) == 0b10)
{
Serial.print("50");
}
if ((Temp[j] & 0b11) == 0b11)
{
Serial.print("75");
}
Serial.println(176,BYTE);
//}
//delay(1000);
}//end reading sensors
}//end time
if (Serial.available() > 0) // Is a character waiting in the buffer?
{
Rxchar = Serial.read(); // Get the waiting character
if (Rxchar == '@') // Can start recording after @ symbol
{
if (Cmdcomplete != 1)
{
Rxenable = 1;
Rxptr = 1;
}//end cmdcomplete
}//end rxchar
if (Rxenable == 1) // its enabled so record the characters
{
if ((Rxchar != 32) && (Rxchar != '@')) //dont save the spaces or @ symbol
{
Rxbuf[Rxptr] = Rxchar;
//Serial.println(Rxchar);
Rxptr++;
if (Rxptr > 13)
{
Rxenable = 0;
}//end rxptr
}//end rxchar
if (Rxchar == 13)
{
Rxenable = 0;
Cmdcomplete = 1;
}//end rxchar
}//end rxenable
}// end serial available
if (Cmdcomplete == 1)
{
Cmdcomplete = 0;
cmdbuf[0] = toupper(Rxbuf[1]); //copy and convert to upper case
cmdbuf[1] = toupper(Rxbuf[2]); //copy and convert to upper case
cmdbuf[2] = 0; //null terminate Command = Chr(rxbuf(3)) + Chr(rxbuf(4))
// Command = Ucase(command)
//Serial.println(cmdbuf);
valbuf[0] = Rxbuf[3]; // Mystr = Chr(rxbuf(5))
R = Rxptr - 1;
for (i = 4 ; i <= R ; i++)//For I = 6 To R
{
valbuf[i-3] = Rxbuf*; //Mystr = Mystr + Chr(rxbuf(i))*
-
}*
-
valbuf[R+1] = 0; //null terminate*
-
Param = atoi(valbuf);// Param = Val(mystr)*
-
//Serial.println(Param); // 'Print "Parameter: " ; Param*
-
if (strcmp(cmdbuf,"NS")==0) //NumSensors*
-
{*
-
//'Print "command was ON"*
-
if ((Param <= 8) && (Param > 0))*
-
{*
-
NumSensors = Param; *
-
}*
-
}*
-
if (strcmp(cmdbuf,"UD")==0) //UpdateDelay*
-
{*
-
//'Print "command was ON"*
-
if ((Param <= 60) && (Param >= 0))*
-
{*
-
UpdateDelay = Param; *
-
}*
-
}*
-
if (strcmp(cmdbuf,"SV")==0) //Save*
-
{*
-
EEPROM.write(0,NumSensors);*
-
EEPROM.write(1,UpdateDelay);*
-
EEPROM.write(511,1);*
-
}*
-
}*
}
void logData( int Temp)
{
-
char buffer[5];*
-
Serial.print("#S|GOGETTEMP|[");*
-
Serial.print(itoa((Temp), buffer, 10));*
-
Serial.print(";");*
-
Serial.println("]#");*
-
readSerialString(serInString,1000);*
}
{
- long startTime=millis();*
- int i;*
- while (!Serial.available()) {*
- if (millis()-startTime >= timeOut) {*
- return;*
- }*
- }*
- while (Serial.available() && i < serInLen) {*
_ strArray = Serial.read();_
* i++;*
* }*
}
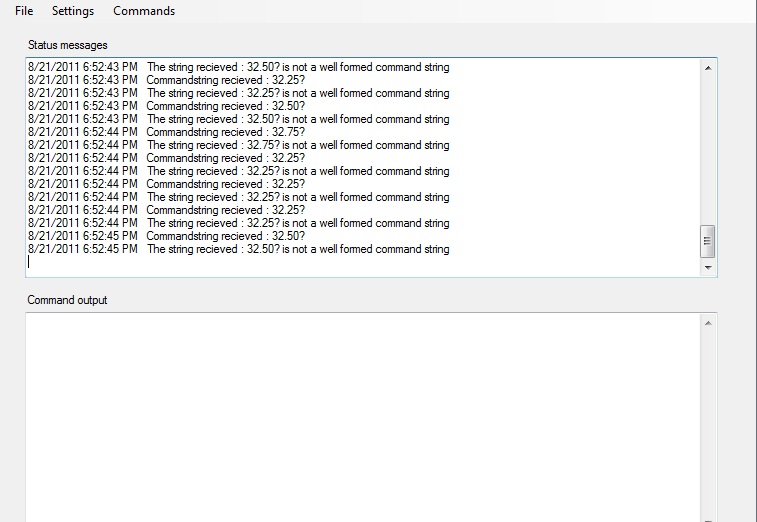
when i executed this code with Gobetwino, the result shown as in the picture i attached. Data is not stored in txt. file at all.