Prima di tutto compri la sensoristica e gli attuatori e li provi separatamente per capire come funzionano.
Per capire se ti trovi davanti ad un ostacolo dovrai usare dei sensori di prossimità, segliendo tra ultrasuoni e ad infrarossi (che puoi anche costruire tu). Gli ultrasuoni arrivano più lontano ma con gli infrarossi credo si possano avere misure più accurate su piccole distanze..
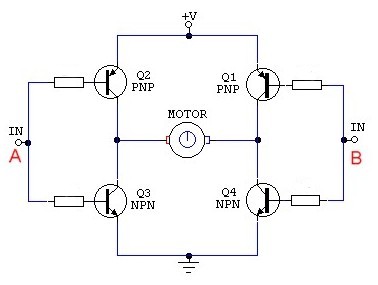
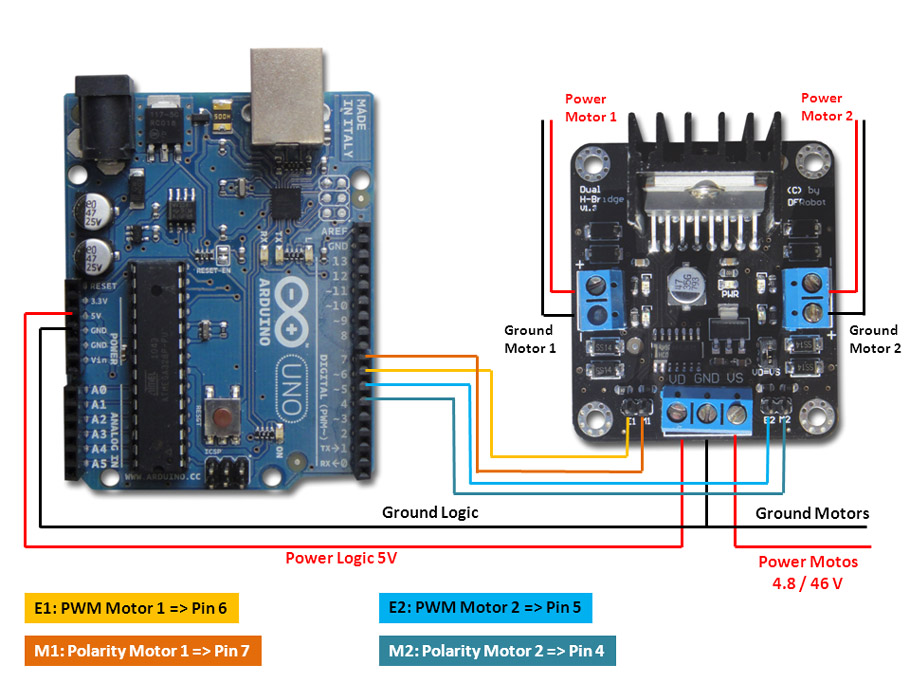
I motori non possono essere alimentati direttamente dall'arduino perchè nella maggior parte dei casi richiedono troppa tensione e/o corrente, quindi dovrai fornirti di una fonte di alimentazione esterna e di un circuito che controlli la polarità dei motori (per invertire il senso di rotazione). In commercio trovi moduli già pronti che ti permettono di controllare solitamente due o più motori, sceglierai quello giusto in base all'assorbimento dei motori.
{kind=link}
{kind=link}
Detto ciò costruisci il chassis del robot in base alle tue esigenze o ne compri uno già pronto, tempo fa tenevo d'occhio questo
{kind=link}