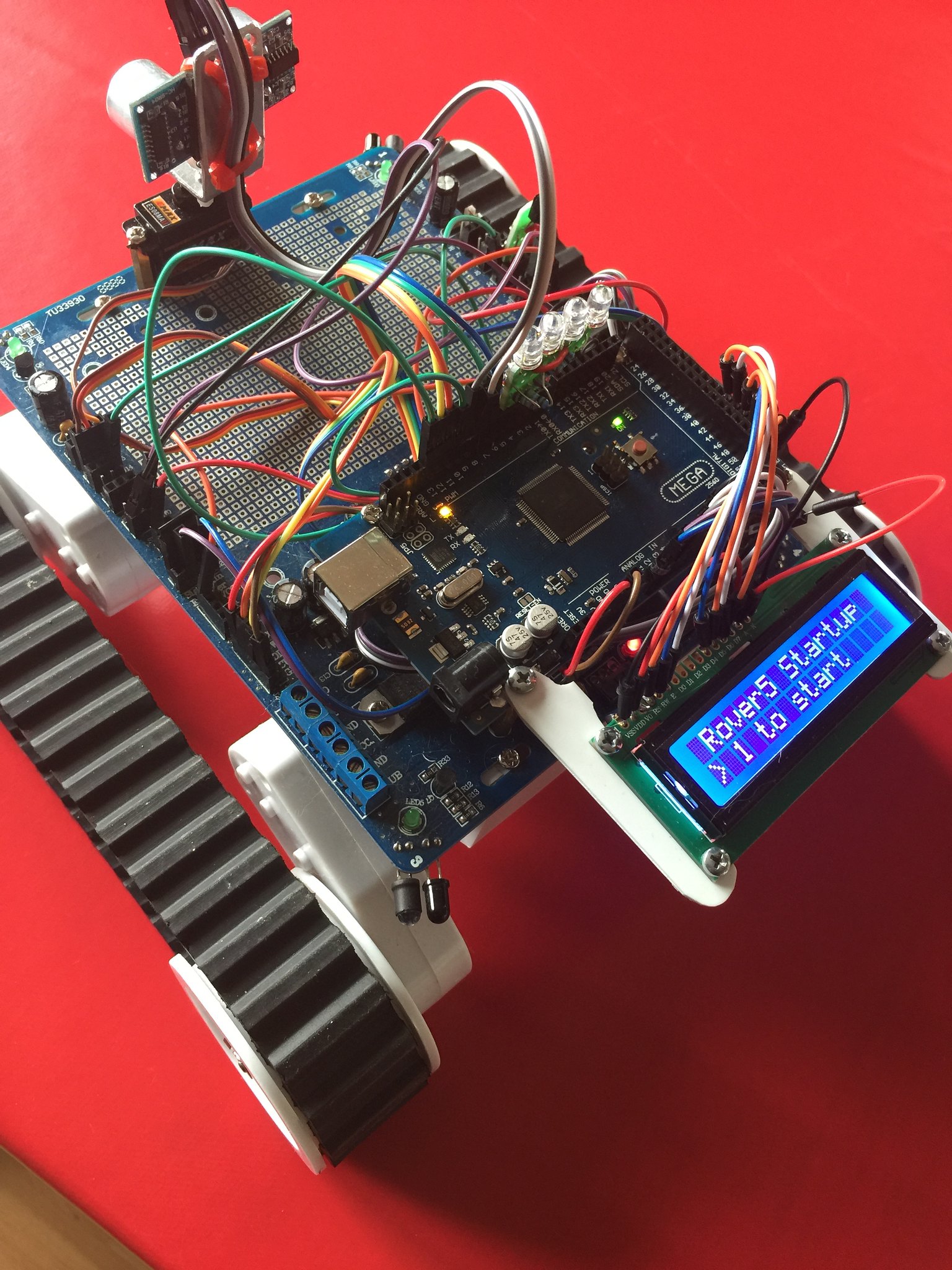
I’m starting with the Dagu 5 Rover Chassis, in its 2 Wheel Drive form and the Explorer Controller Board for Dagu Rover 5 2WD.
I got it for a nice price ![]()
I'm not a programmer but I have some experience with coding for the Arduino, but sensors and some of the other electronic pieces that combine to make a functional robot are new to me. Thanks for your help and input.
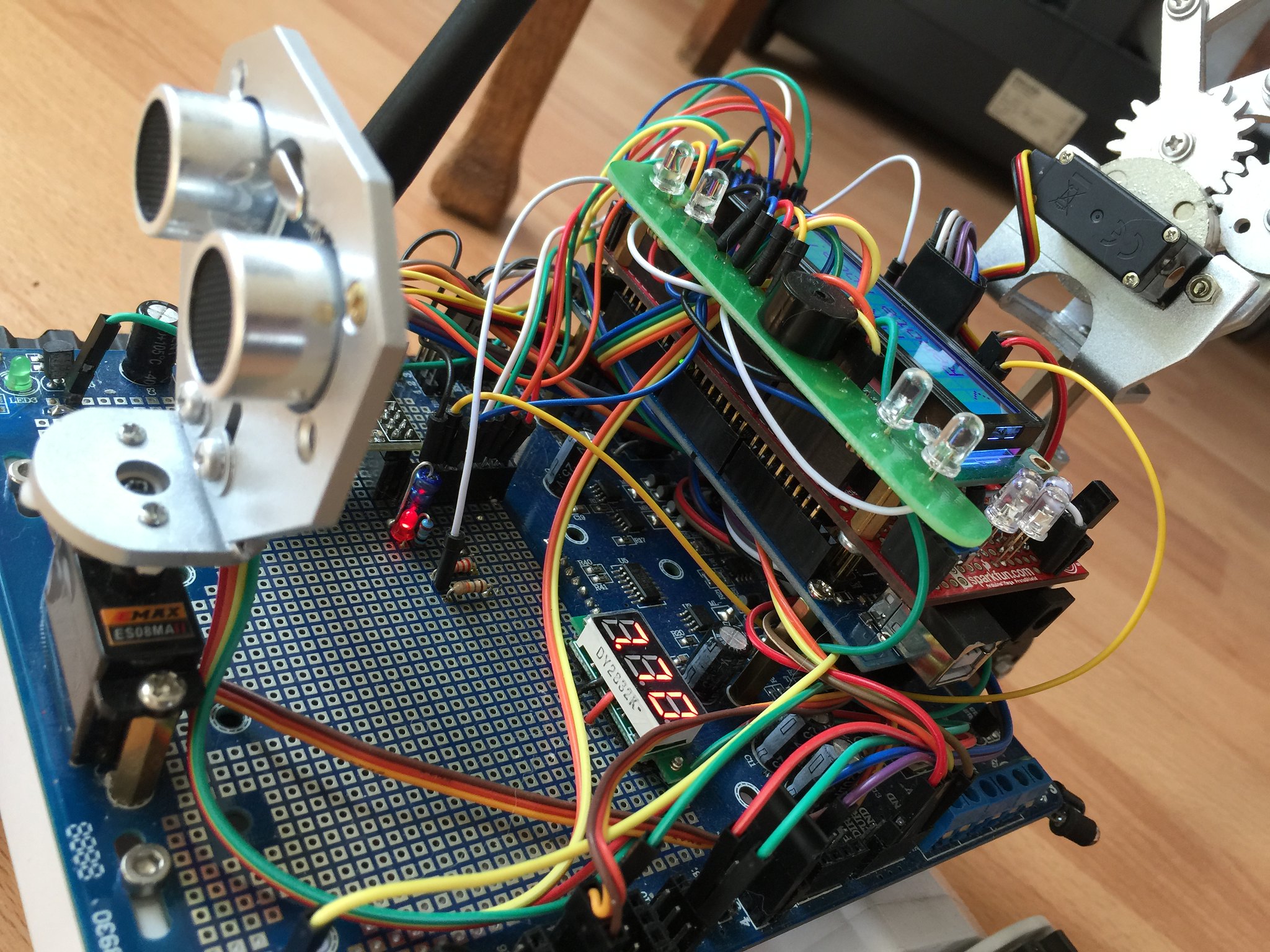
My first sketch is working fine with a ultrasonic sensor (SR04)
// Control of a Rover5 robot - Last update: AndreasVan 2015-02-28 Vers. 2.01
// Dagu Rover 5 2WD Tracked Chassis + Explorer Controller Board for Dagu Rover 5 2WD
// Micro controller = Arduino UNO
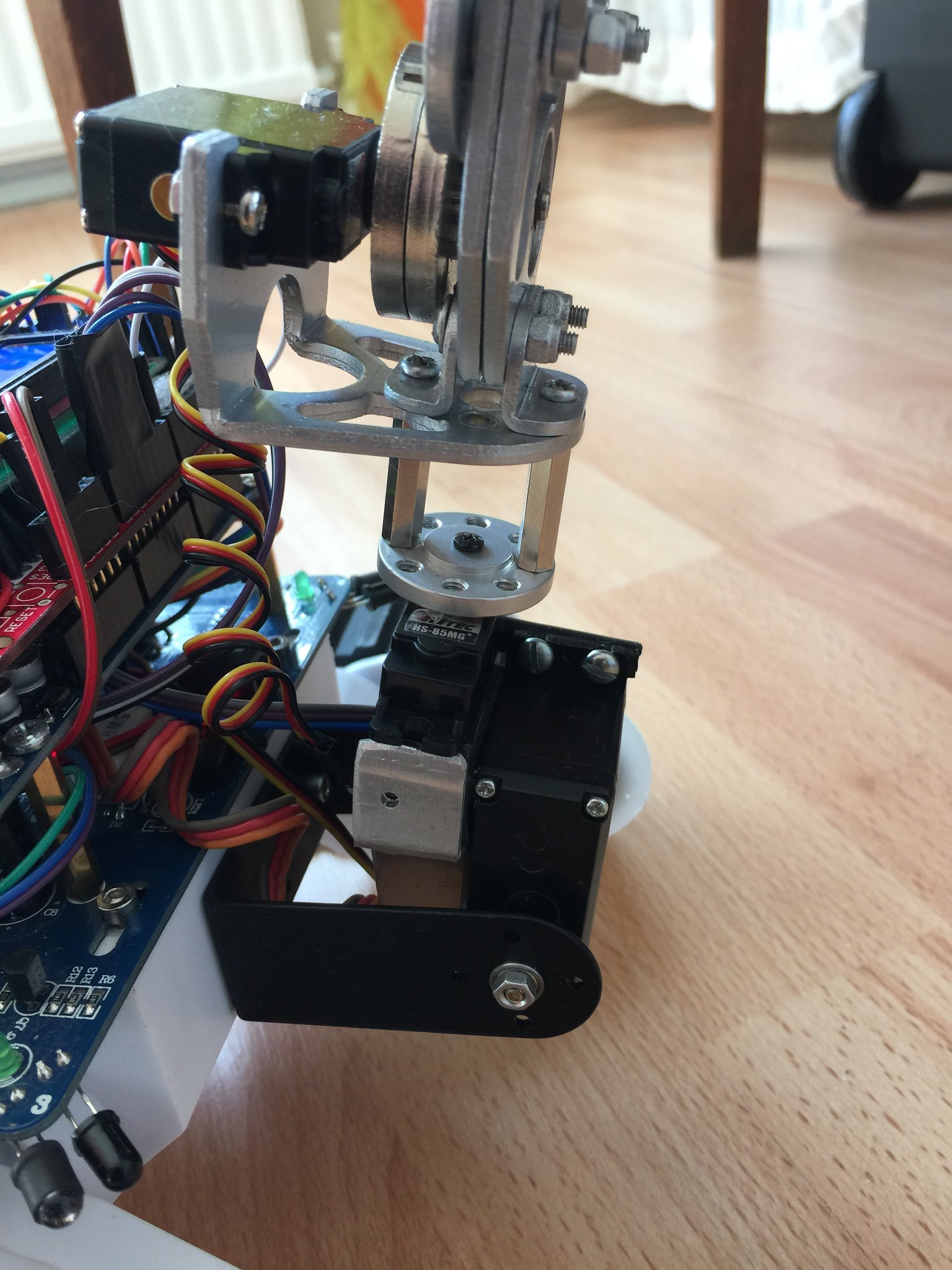
// Detecting obstacles with an SR04 ultrasonic sensor mounted on servo
// this code is public domain, enjoy!
#include <NewPing.h> //library SR04 ultrasonic sensor
#include <Servo.h> //library Servo (SR04 on servo)
#define TRIGGER_PIN 9 // SR04 sensor
#define ECHO_PIN 8 // SR04 sensor
#define MAX_DISTANCE 200 //sensor distance
Servo myservo;
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
#define runEvery(t) for (static typeof(t) _lasttime;(typeof(t))((typeof(t))millis() - _lasttime) > (t);_lasttime += (t))
const int PWN1 = 6; //right PWN
const int DIR1 = 7; //right DIR
const int PWN2 =11; //left PWN
const int DIR2 =12; //left DIR
const int redLed = 5; //robot drives forward
const int greenLed = 4; //robot drives backward
const int yellowLed = 3; //robot turns left
const int blueLed = 2; //robot turns right
int uS; //value of SR04 ultrasonic sensor
int distance; //distance in cm of ultrasonic sensor
int pos = 90; //start position of servo = 90
int servoDirection = 0; //sweeping left or right
int MoveDirection = 0; //0 = forward, 1 = backward, 2 = left, 3 = right
int lastMoveDirection; //last direction of the robot
int distanceCenter;
int distanceLeft;
int distanceRight;
int servoDelay = 55; //servo sweep speed
const int speedLeft = 90; //motor speed left
const int speedRight = 90; //motor speed right
long previousMillis = 0;
const int interval = 1000; // time to switch between the MoveDirections
void setup() {
pinMode(PWN1, OUTPUT);
pinMode(DIR1, OUTPUT);
pinMode(PWN2, OUTPUT);
pinMode(DIR2, OUTPUT);
analogWrite(PWN1, 0);
analogWrite(PWN2, 0);
pinMode(5, OUTPUT);
pinMode(4, OUTPUT);
pinMode(3, OUTPUT);
pinMode(2, OUTPUT);
pinMode(redLed, OUTPUT);
pinMode(greenLed, OUTPUT);
pinMode(yellowLed, OUTPUT);
pinMode(blueLed, OUTPUT);
Serial.begin(9600); //to use the serial monitor
myservo.attach(10); //servo on pin 10
myservo.write(pos); //center servo
}
void loop() {
sweepServo(); //servo sweep function
getDistance(); //ultrasonic sensor distance
if (pos >= 15 && pos <= 45)
{
distanceRight = distance; //measured distance servo is to the right = distanceRight
}
if (pos >= 135 && pos <= 165)
{
distanceLeft = distance; //measured distance servo is to the left = distanceLeft
}
if (pos > 70 && pos < 110)
{
distanceCenter = distance; //measured distance servo in centred = distanceCenter
}
if (distanceCenter >= 25) //no obstacle to see for miles, straight on
{
MoveDirection = 0; //move forward
}
else //obstacle detected, turn left or right?
{
if (distanceLeft > distanceRight)
{
MoveDirection = 2; //turn left = 2
}
if (distanceLeft < distanceRight)
{
MoveDirection = 3; //turn right = 3
}
if (distanceLeft <= 5 && distanceCenter <= 5 || distanceRight <= 5 && distanceCenter <= 5)
{
MoveDirection = 1; // turn back
}
}
unsigned long currentMillis = millis(); //set a timer
if(MoveDirection == 0 && MoveDirection == lastMoveDirection)
{
forward();
lastMoveDirection = MoveDirection;
}
if(MoveDirection == 0 && MoveDirection != lastMoveDirection && currentMillis - previousMillis > interval )
{
forward();
lastMoveDirection = MoveDirection;
previousMillis = currentMillis;
}
if(MoveDirection == 1 && MoveDirection == lastMoveDirection)
{
backward();
lastMoveDirection = MoveDirection;
}
if(MoveDirection == 1 && MoveDirection != lastMoveDirection && currentMillis - previousMillis > interval )
{
backward();
lastMoveDirection = MoveDirection;
previousMillis = currentMillis;
}
if(MoveDirection == 2 && MoveDirection == lastMoveDirection)
{
left();
lastMoveDirection = MoveDirection;
}
if(MoveDirection == 2 && MoveDirection != lastMoveDirection && currentMillis - previousMillis > interval )
{
left();
lastMoveDirection = MoveDirection;
previousMillis = currentMillis;
}
if(MoveDirection == 3 && MoveDirection == lastMoveDirection)
{
right();
lastMoveDirection = MoveDirection;
}
if(MoveDirection == 3 && MoveDirection != lastMoveDirection && currentMillis - previousMillis > interval )
{
right();
lastMoveDirection = MoveDirection;
previousMillis = currentMillis;
}
}
void forward()
{
digitalWrite(DIR1, LOW);
digitalWrite(DIR2, LOW);
analogWrite(PWN1, speedLeft);
analogWrite(PWN2, speedRight);
digitalWrite(redLed, HIGH);
digitalWrite(greenLed, LOW);
digitalWrite(yellowLed, LOW);
digitalWrite(blueLed, LOW);
}
void stop()
{
digitalWrite(DIR1, LOW);
digitalWrite(DIR2, LOW);
analogWrite(PWN1, 0);
analogWrite(PWN2, 0);
digitalWrite(redLed, LOW);
digitalWrite(greenLed, LOW);
digitalWrite(yellowLed, LOW);
digitalWrite(blueLed, LOW);
}
void backward()
{
digitalWrite(DIR1, HIGH);
digitalWrite(DIR2, HIGH);
analogWrite(PWN1, speedLeft-10);
analogWrite(PWN2, speedRight-10);
digitalWrite(redLed, LOW);
digitalWrite(greenLed, HIGH);
digitalWrite(yellowLed, LOW);
digitalWrite(blueLed, LOW);
}
void left()
{
digitalWrite(DIR1, LOW);
digitalWrite(DIR2, HIGH);
analogWrite(PWN1, speedLeft-20);
analogWrite(PWN2, speedRight+20);
digitalWrite(redLed, LOW);
digitalWrite(greenLed, LOW);
digitalWrite(yellowLed, HIGH);
digitalWrite(blueLed, LOW);
}
void right()
{
digitalWrite(DIR1, HIGH);
digitalWrite(DIR2, LOW);
analogWrite(PWN1, speedLeft+20);
analogWrite(PWN2, speedRight-20);
digitalWrite(redLed, LOW);
digitalWrite(greenLed, LOW);
digitalWrite(yellowLed, LOW);
digitalWrite(blueLed, HIGH);
}
void getDistance()
{
runEvery(20) //loop for ultrasonic measurement
{
uS = sonar.ping();
distance = uS / US_ROUNDTRIP_CM;
if (uS == NO_ECHO) // if the sensor did not get a ping
{
distance = MAX_DISTANCE; //so the distance must be bigger then the max vaulue of the sensor
}
Serial.print("Ping: "); //to check distance on the serial monitor
Serial.print(distance);
Serial.println("cm");
}
}
void sweepServo()
{
runEvery(servoDelay) //this loop determines the servo position
{
if(pos < 165 && servoDirection == 0) // 165 = servo to the left
{
pos = pos + 5;
}
if(pos > 15 && servoDirection == 1) // 15 = servo to the right
{
pos = pos - 5;
}
}
if (pos == 165 )
{
servoDirection = 1; //changes direction
}
if (pos == 15 )
{
servoDirection = 0; //changes direction
}
myservo.write(pos); //move servo!
}
The next step is to use the IR sensors on the Explorer board and here is the beginning of my problems.
When the rover find a obstacle he only drive forward and backward on the same place ... on and on and on ...