Hallo,
ich wollte hier mal im neuen Beitrag das fertige Projekt vorstellen.
Bei diesem hat mir ein Mitglied hier aus dem Forum geholfen.
Oder besser gesagt das wichtigste hat er gemacht, dafür bin
ich Ihn sehr dankbar!
In diesem Projekt wollte ich quasi die Beleuchtung steuern über
IP-Symcon. Dabei aber auch Sensorwerte zu dem Server übermitteln.
Einen Langzeittest habe ich leider noch nicht machen können.
Das alte Thema fing hier an:
Klick
Besonderen Dank an Agmue für die Hilfe!
#include <SPI.h>
#include <Ethernet.h>
#include "Mudbus.h"
// getestet mit Mega2560
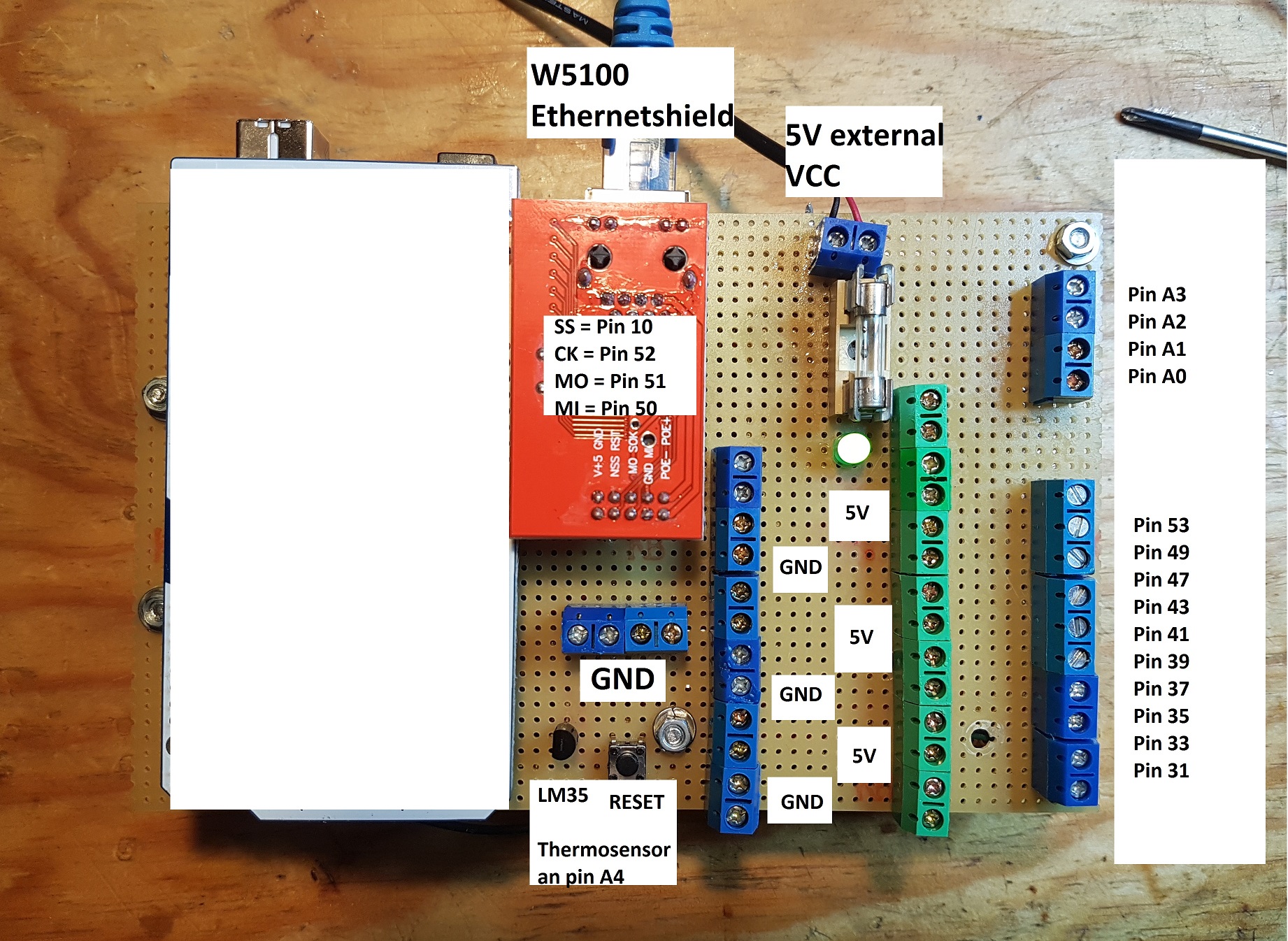
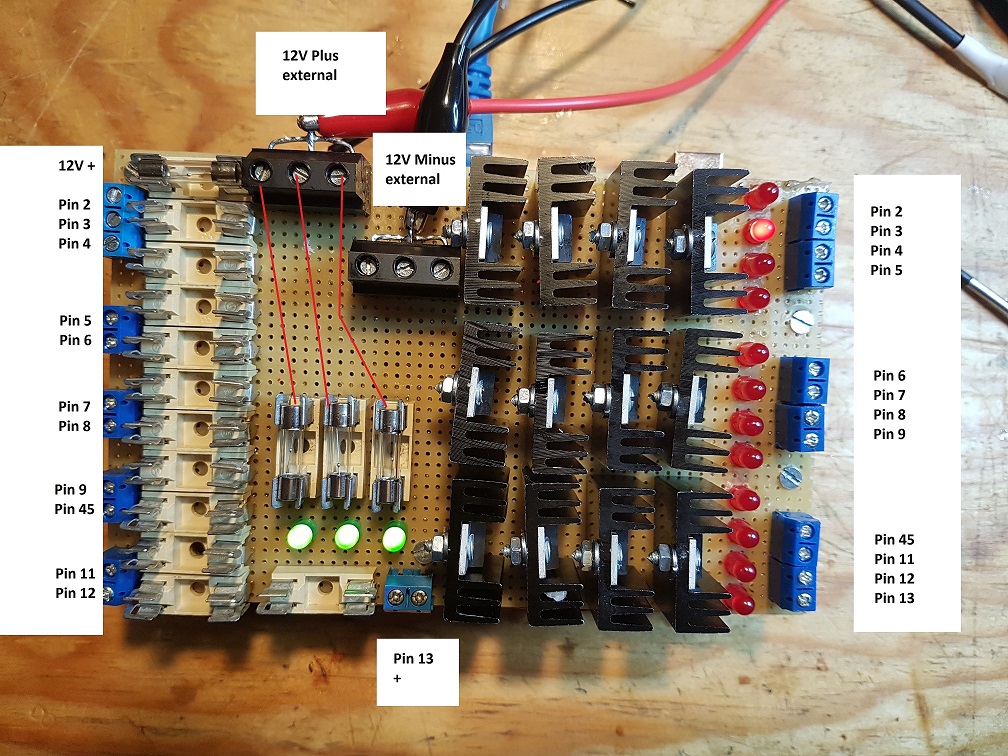
const byte ausgaenge[] = {2, 3, 4, 5, 6, 7, 8, 9, 45, 11, 12, 13};
const byte PWM = sizeof(ausgaenge);
const byte R[] = {2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13}; // Indexwerte fuer Mb.R[]
int8_t fadeAmount[PWM]; // how many points to fade the LED by
unsigned long currentTime;
unsigned long loopTime;
int brightness[PWM], altModbuswert[PWM], aktModbuswert[PWM];
int sensorwert; // LM35 Temperatur auslesen.
int temperatur = 0; //Unter d
Mudbus Mb;
//Function codes 1(read coils), 3(read registers), 5(write coil), 6(write register)
//signed int Mb.R[0 to 125] and bool Mb.C[0 to 128] MB_N_R MB_N_C
//Port 502 (defined in Mudbus.h) MB_PORT
void setup()
{
Serial.begin(9600);
Serial.println(F("Programmstart"));
for (byte ausgang = 0; ausgang < PWM; ausgang++)
{
fadeAmount[ausgang] = 5;
brightness[ausgang] = 255; // Anfangswert "aus"
altModbuswert[ausgang] = 255; // Anfangswert "aus"
aktModbuswert[ausgang] = 255; // Anfangswert "aus"
}
currentTime = millis();
loopTime = currentTime;
uint8_t mac[] = { 0x90, 0xA2, 0xDA, 0x00, 0x51, 0x06 };
uint8_t ip[] = { 192, 168, 178, 70 };
uint8_t gateway[] = { 192, 168, 178, 1 };
uint8_t subnet[] = { 255, 255, 255, 0 };
Ethernet.begin(mac, ip, gateway, subnet);
//PWM Frequenz
//0×01 1 31.374 KHz
//0×02 8 3.921 Khz
//0×03 64 490.1 Hz // default
//0×04 256 122.5 Hz
//0×05 1024 30.63 Hz
//http://playground.arduino.cc/Main/TimerPWMCheatsheet
TCCR1A = (TCCR1A & 0xF8) | 0x01;
TCCR0A = (TCCR0A & 0xF8) | 0x01;
TCCR0B = (TCCR0B & 0xF8) | 0x01;
TCCR2B = (TCCR2B & 0xF8) | 0x01;
}
void loop()
{
Mb.Run();
currentTime = millis();
//PWM Ausgänge:
for (byte ausgang = 0; ausgang < PWM; ausgang++)
{
altModbuswert[ausgang] = aktModbuswert[ausgang];
aktModbuswert[ausgang] = Mb.R[R[ausgang]];
if (altModbuswert[ausgang] != aktModbuswert[ausgang])
{
if (brightness[ausgang] < aktModbuswert[ausgang]) {
fadeAmount[ausgang] = 5;
} else {
fadeAmount[ausgang] = -5;
}
}
}
if (currentTime - loopTime >= 1000) { // 1,5 Sekunden scheint mir recht lange zu sein
loopTime = currentTime; // Updates loopTime
for (byte ausgang = 0; ausgang < PWM; ausgang++)
{
if ((brightness[ausgang] < aktModbuswert[ausgang] && fadeAmount[ausgang] > 0) || (brightness[ausgang] > aktModbuswert[ausgang] && fadeAmount[ausgang] < 0)) {
brightness[ausgang] += fadeAmount[ausgang];
analogWrite(ausgaenge[ausgang], brightness[ausgang]);
}
//Serial.println();
}
}
// Digitale Eingänge herauslesen und zu Modbus übergeben:
//Pin31
Mb.R[14] = digitalRead(31);
//Pin33
Mb.R[15] = digitalRead(33);
//Pin35
Mb.R[16] = digitalRead(35);
//Pin37
Mb.R[17] = digitalRead(37);
//Pin39
Mb.R[18] = digitalRead(39);
//Pin41
Mb.R[19] = digitalRead(41);
//Pin43
Mb.R[20] = digitalRead(43);
//Pin47
Mb.R[21] = digitalRead(47);
//Pin49
Mb.R[22] = digitalRead(49);
//Pin53
Mb.R[23] = digitalRead(53);
// Analoge Eingänge herauslesen und zu Modbus übergeben:
//Pin Analog 0
Mb.R[24] = analogRead(0);
//Pin Analog 1
Mb.R[25] = analogRead(1);
//Pin Analog 2
Mb.R[26] = analogRead(2);
//Pin Analog 3
sensorwert = analogRead(3); // LM35 am Pin A3 12V Netzteil
temperatur = map(sensorwert, 0, 307, 0, 150);
Mb.R[27] = temperatur;
//Pin Analog 4
sensorwert = analogRead(4); // LM35 am Pin A4 Platine Mega - Modbus
temperatur = map(sensorwert, 0, 307, 0, 150);
Mb.R[28] = temperatur;
}
Gruß
mudbus.zip (43.9 KB)
MegaModbusFade.ino (3.6 KB)