Das bezieht sich auf den Arduino Uno Rev 3:
Ich arbeite das erste Mal mit dem Mikrokontroller und würde gerne zwei Bassshaker und drei Drehspulinstrumente als Zeiger damit betreiben und befinde mich in der Planungsphase. Den Uno hab ich schon, war ein Weihnachtsgeschenk.
Ich hab einen Algorithmus geschrieben, der mir meinen Analogwert in ein Digitales Signal umwandelt, mit beliebiger Auflösung. Im Moment benutze ich 200 Stufen, also ein bisschen kleiner als 8bit.
Ich habe erstmal angenommen ich kann den digitalen Ausgang mit 1MHz ansteuern, da ich keine Spez. dazu gefunden habe.
Ich habe das ganze mal mit LTSpice simuliert.
Das hier ist mein Analoges Signal, welches an den Bassshaker übertragen werden soll.

1 Sekunde - Frequenzen zwischen 40 und 100Hz ausser gegen Ende, da habe ich wohl eine kleine Störung drin.
Das ganze setze ich dann in ein digitales Signal um:


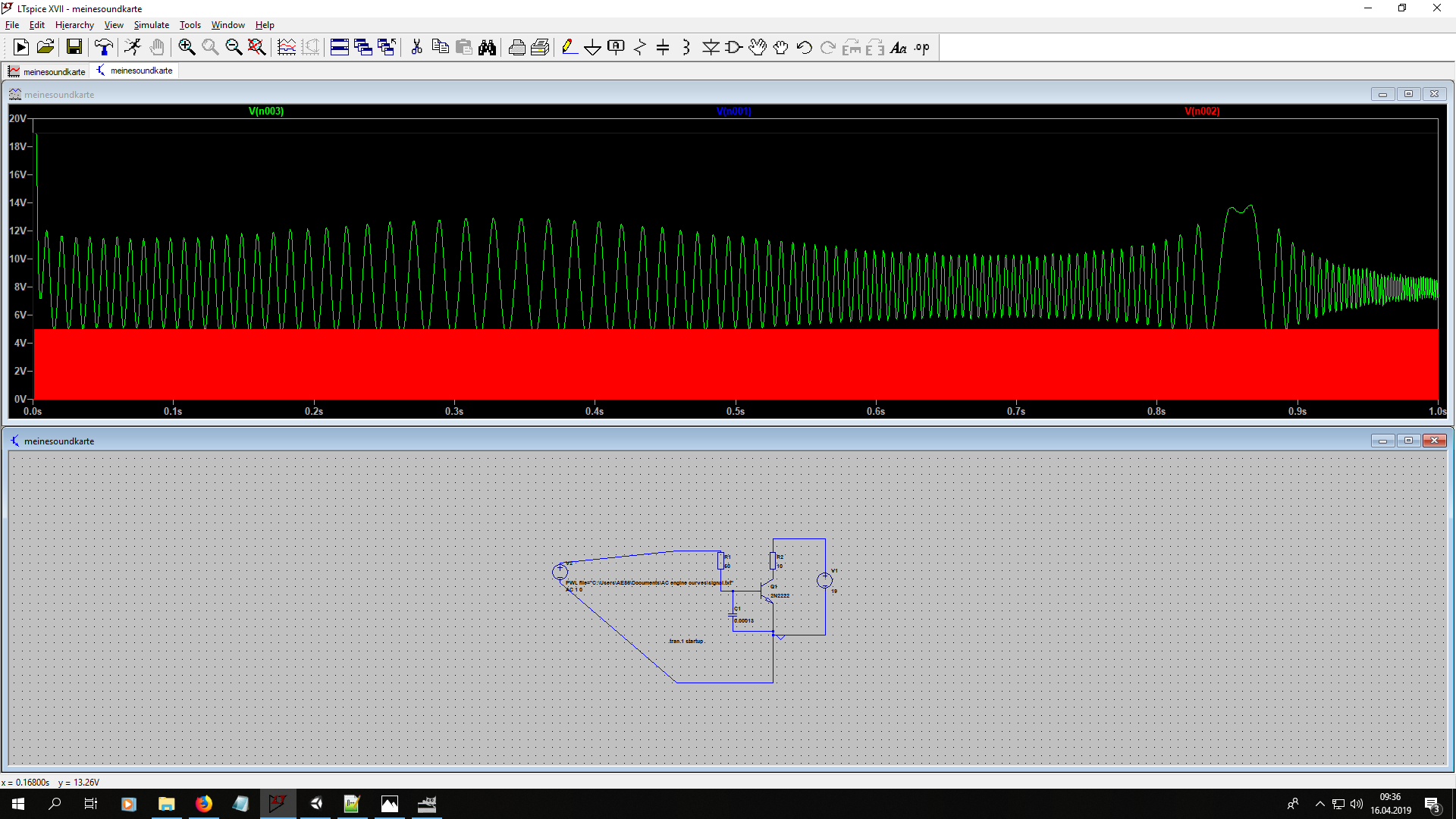
Rot ist der Digitale Eingang, grün der Spannungsabfall über dem Bassshaker/Drehspulinstrument = R2.
Das ist meine Schaltung:

Ein simpler Tiefpass.
Ich mach das das erste Mal, also wenn jemand Verbesserungsvorschläge hat, oder ich was falsch gemacht habe, immer her damit.
Ich meine mich zu erinnern, dass es mehrere Takte dauert, bis der Ausgang an einem Mikroprozessor geändert werden kann, deswegen erstmal 1MHz, wie lange dauert es denn genau oder welche Änderungsrate lässt die komplexe Programmierung des Arduinos überhaupt zu?
Liebe Grüße Just