... , I think you need to graduate to a linear device, ...
Yeah, that is right.
I got distracted a "bit" in the last 8 months and looked for other stuff needed for a fast driving autonomous robot.
Played with measuring speed of light with Arduino, and played with logic analyzers up to 400Msps.
Played with all kinds of microcontrollers more powerful than Arduino Due (Raspberry Pi Zero, Nanopi Neo [Air], Orange Pi Zero, ...) and different kinds of cameras (USB and Raspberry camera). While I initially thought that camera will be processed by Arduino Due I am pretty sure right now that one of the other controllers will do. The gstreamer framework is too powerful for not being used. The preprocessing of the video images will be done on the other microcontroller as well. With a simple 2$ USB webcam good 240x320 pictures can be taken, this allows to see "the present" at bottom of image, and "the near future" at the top:

The Raspberry camera allows for 90fps video at resolutions 640x480 or 320x240 which would give an image every 6cm even when running with 5m/s (18km/h).
Anyway, I am back on making Arduebot run fast straight and measure that. The method I will use is to run quickly parallel to a very long wall [there are straight walls of 40m without interruption in basement of Böblingen IBM lab ;-)]. That way I don't have to follow a line just now, only for speed measurement.
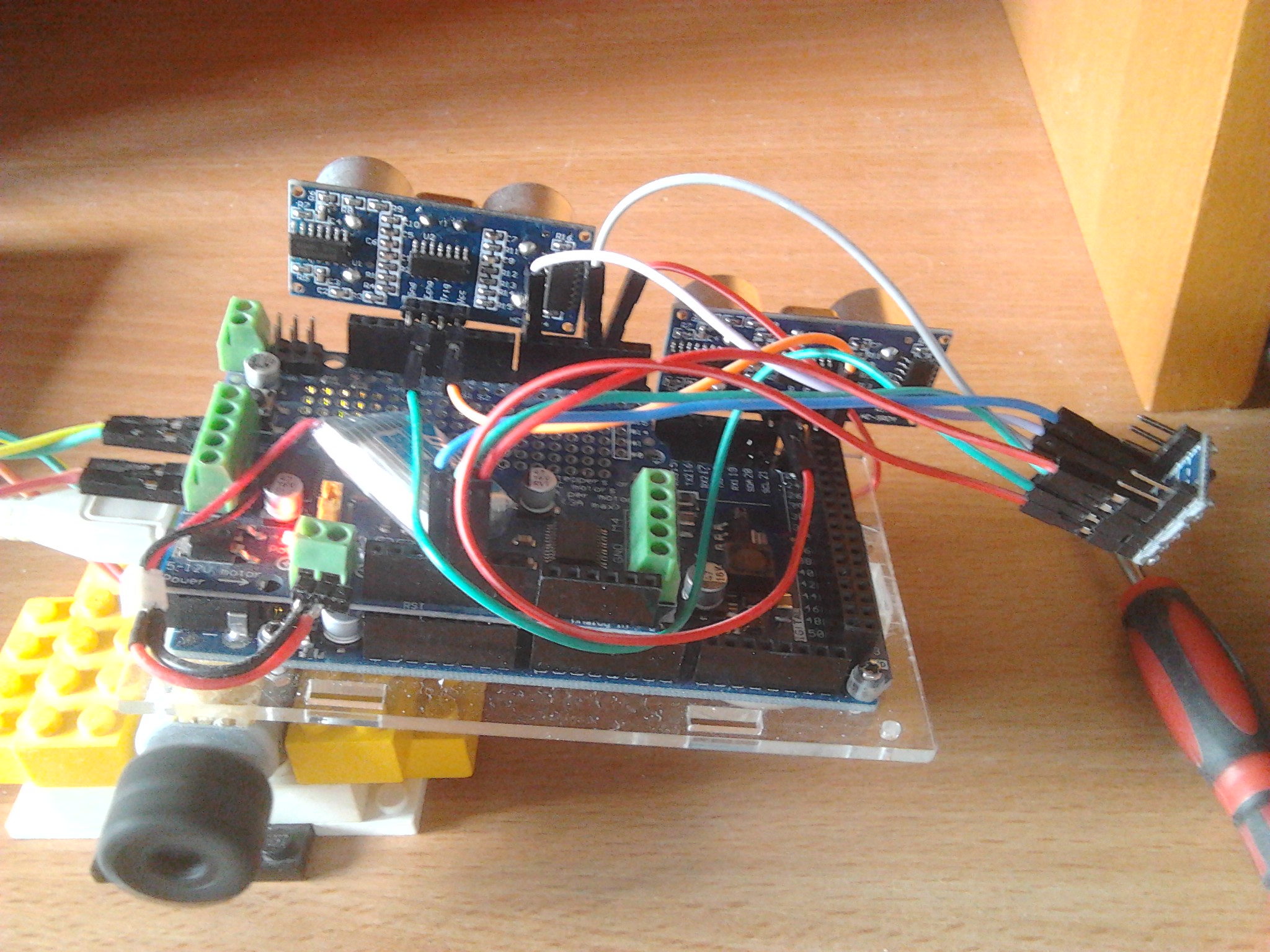
In this posting I added two HC-SR04 ultrasonic range sensors to the left side of the Arduino Due with v2.0 motor shield. Now I tested if and how running motors would effect the distance measurement precision, with a jacked Arduebot for the moment:
To my surprise there were bigger measurement ranges than I would have expected (1174 measurements for one of the two HC-SR04):
$ wc --lines vals
1174 vals
$ sort vals | uniq -c
7 1790
17 1791
75 1815
750 1816
254 1817
38 1818
26 1819
6 1820
1 1842
$ bc -ql
(1842-1790)/5.82
8.93470790378006872852
The majority is pretty stable at 1816/1817μs (1816/5.82=312mm distance to wall). Difference betwen max and min of measurements corresponds to 9mm. Overall the measurement distribution looks good under vibrations since the Arduebot control algorithm will deal with them (eg. PID controller).
Next step is letting robot move slowly and try to keep it parallel to wall.
(running motors with only 1 Lipo instead of 4 for now)
Hermann.