This time I bought a 29$ camera drone to help locate the yellow airplane, which I had restricted to a few trees acoustically before (by turning airplane motors on/off): https://www.amazon.de/gp/product/B06ZYSFZL3
(small part from 1280x720 camera drone frame showing yellow RC airplane)
Besides helping on search part of search&rescue, I have more plans with the drone (inclusive Raspberry Pi doing 3D position determination of drone from two other PIs with a camera each and controlling the drone via RTC). My initial plan was to allow the drone unlimited flight time inhouse by replacing the Lipo with two very thin (0.2mm) cables to power on ground. And that is where I have a question here.
The drone lipo is 450mAh 25C. From what I read that means the lipo can deliver 0.45*25=11.25A for 1V.
I measured fully loaded lipo as 4.25V, and then while measuring voltage with one hand I turned drone motors to maximal speed with the other. The measured voltage dropped to 3.80V that way:
That converter can deliver 1.25V-37V at 3A on output side, I use it to generate 4V.
By above lipo calculation and the measured 3.8V under full speed, the lipo should deliver 0.45*25/3.8=2.96A.
I don't understand why the 3A mains adapter with step down converter is not able to power the drone the same as lipo (the electronic starts, but when trying to turn the drone motors, only two of the propellers move single digit degree and then stop). What am I missing? How do I have to power the drone via cable from ground in order to allow endless inhouse flight?
Try adding a big capacitor in parallel with the power supply. Maybe 1000uF to 10,000uF. Put it as close as possible to the drone, like directly on the battery leads.
That's not how you calculate the current coming out of a battery. 450mAh @ 25C means it can provide 11.25A maximum (at least in theory)...not at 1V but at it's normal voltage. To calculate the current based on the battery volt drop you would need to know the effective impedance of the battery which you don't. It's usually easier and a lot more useful to measure the current.
So basically the lipo can provide up to 11.25A. Your power supply can provide around 3A. It's not exactly surprising that it's not good enough.
Will test on Monday whether 8.5A are sufficient to let drone fly.
P.S:
Given that I burned normal breadboard cables with some amps for motors in the past, the idea of using very light 0.2mm cables seems unrealistic if pushing definitely more than 3A through. Best would be cables that are light weight and still can deal with say 10A ...
Give up on the idea of a drone being able to lift the extra weight of a high current supply cable, its
not going to happen.
11A at 3.7V is about 0.3 ohm load. thus the wires should be at most 0.03 ohms, which for 10m length
would mean perhaps 2kg of copper or aluminium in the cables...
Low voltage power doesn't travel long distances without stupidly thick cables. The only hope for tethered
flight is to send the power at a higher voltage and buck-convert on the rotorcraft - a high power buck converter
may weigh a lot more than the LiPo battery.
So the correct approach is to fly from battery, and tether using fishing line, or spectra/dyneema kite line, which is much much lighter.
MarkT:
Give up on the idea of a drone being able to lift the extra weight of a high current supply cable, its
not going to happen.
That sounds reasonable.
Today the DC-DC 10A stepdown converter arrived.
I connected 20V 8.5A mains adapter to drone with it, 4.19V without load, that dropped to 3.73V with drone connected.
This is better what I tried before, this time all 4 propellers turn, and they turn longer than last time, but after a second they stop.
So even 8.5A is not enough current to power the drone, as can be seen in this youtube video:
MorganS:
Remind us how you are converting the 20V down to the LiPo voltage?
As can be seen in youtube video and screenshot above I use the step-down converter I pointed to (German text, google translate will help): https://www.amazon.de/gp/product/B00HV4EPG8
I connected the 20V 8.5A from mains adapter to input of converter, and connected its output to drone directly. I used the screw of the step-down converter to make output 4.19V from 20V input.
That behaviour sounds more like you are overheating the voltage converter.
I checked that, both heat sinks do not even get wam.
HermannSW:
with two very thin (0.2mm) cables to power on ground.
Did you take your multimeter and measure the total resistance of your supply and return wires? Eg...... how many metres of wire is it? And what's the measured resistance along those lengths.
If you use a big hefty bench power supply, and if your cables have low enough resistance, then the flying device should be able to at least do something good. The rest would be up to the capabilities of the step-down converters that you're using.
How is that tiny 'copter supposed to lift that huge buck converter then?
As I said, its not feasible, use a LiPo and some fishing line as a tether if you need a tether, and
swap batteries as needed.
Just the drag and torque forces from lifting a long wire are likely to mess up the flight stability too - I really
don't think its going to work.
If you want to run from external power you need high power high voltage low current motors
on the 'copter to allow very fine wires - and no-one to my knowledge makes such things.
Alternatively you'll need to find some cutting edge GaNFET buck converter module that can
handle enough power in a tiny lightweight package.
Southpark:
Did you take your multimeter and measure the total resistance of your supply and return wires? Eg...... how many metres of wire is it? And what's the measured resistance along those lengths.
Thank you that guided me into the right direction. The long cables I used to connect step-down converter to drone had several Ohms each. Replacing by shorter cables now all 4 have 0.3Ω each.
MarkT:
How is that tiny 'copter supposed to lift that huge buck converter then?
Of course the buck converter has to stay on ground.
If you want to run from external power you need high power high voltage low current motors
on the 'copter to allow very fine wires - and no-one to my knowledge makes such things.
The cable is too short, but hey, this is first flight ...
The lipo now not on drone does weigh 12.8g, the small cables from buck converter to drone connector do weigh 0.5g.
At least 12.3g of additional cable should be fine for drone to lift tethered.
My point is it won't scale to anything but a very short cable, as the cable resistance has to be very low.
The longer the cable the thicker it has to be, such that the total mass of copper goes up as the square of
the cable length, rapidly becoming completely unworkable for these impedances.
There is one approach that can work, which is to provide a constant current supply and thin wires. On board
the copter you simply dissipate unused current in what is effectively a high power zener diode, and the wires
run hot due to the heavy losses. The supply voltage has to be larger for longer cables, but the cable
thickness is constant.
However that still means the cable mass goes up with length - the only real approach is to choose
higher voltages for longer cables, then you can use finer and finer wires.
And dissipating a dozen watts or so has its problems, but at least you get good air-cooling in a 'copter.
It might be working looking at what PoE modules are available these days, PoE has the same problem
set to overcome, transmit power efficiently over long thick wires and convert to usable voltage at the
far end.
HermannSW:
At least 12.3g of additional cable should be fine for drone to lift tethered.
Fair enough...provided you add that extra cable without increasing the overall resistance. Which means you don't get very much extra length because the longer the cable is the thicker and so heaver it needs to be to keep the resistance down.
So, there is a whole lot of theoretical solutions with fairly severe constraints.
But every real-world drone like this runs on batteries.
So run on batteries.
Want more flight time for indoor use? (which I think is the original point)
Get more batteries.
vinceherman:
Want more flight time for indoor use? (which I think is the original point)
Get more batteries.
Good point.
I tried 60cm 0.2mm cables, and while all 4 rotors rotated, not enough power to lift. And rotation became slower and slower until stopping after 8 seconds.
Next I tried 60cm 0.5mm cables, with that propellers did rotate with more power, but not enough to lift. Rotation became slower and slower again, but ended after more than 15 seconds.
Then did cut the cables and here drone to buck converter cables are of length 39cm. I measured the cable resistance as 0.4Ω each. This time the drone flies (I did not control it good). Again propellers got slower and slower, but end only after more than 30 seconds:
The question I have is why does propellers get slower and stop? No smell, cables seem to be fine, nothing gets hot or even warm.
If I disconnect mains power, wait some seconds, power again I can repeat this experiment. I assume it is nothing in the drone that is responsible for slowing down and stop. So is the buck converter responsible, or the 39cm cables?
P.S:
Cable length of 39cm would be totally fine for flying inside my motor test station with two cameras for drone 3D locating as mentioned before.
I tried an even thicker cable (extracted from a mains power cable), with 35cm a little bit shorter, and that resulted in unlimited drone flight time! I played with the drone for more than 40 minutes without pause, that is the reason I think there is no limit. The problem is that the cables are too stiff, flying is really difficult with them.
Because flying is so difficult I used a trick, making it easier to keep the drone from escaping:
So this proves that unlimited inhouse drone flight is possible, Next steps are to determine which lighter and less stiff cables do works as well, to gain full flight control and probably a little bit more range.
P.S:
The two 35cm cables do weigh only 7.8g, still 4.5g left for longer cables (reaching weight of lipo missing now).
HermannSW:
So this proves that unlimited inhouse drone flight is possible, Next steps are to determine which lighter and less stiff cables do works as well, to gain full flight control and probably a little bit more range.
Good job!
I've always wondered about doing the same thing. And I also dream of longer cables....
Ideas on your project:
You could do your own buck converter with a Zener diode, it will probably weight less. I believe it won't reach 15g (example).
With a buck converter attached to the drone, you would not need the thicker cables.
That is a rather misleading page. Did you notice that the only difference between the two switching circuits is that the switch is drawn either open or closed?
The final circuit with the zener is not a switchmode converter. Buried in the last paragraph is "linear mode". In fact, that is an extraordinarily inefficient linear regulator. A 7812 could replace that circuit and give significantly better performance.
Sunnytec:
You could do your own buck converter with a Zener diode, it will probably weight less. I believe it won't reach 15g
This might be an idea for bigger drones, but the drone I used does weigh 50g only (I cannot weigh now, see below, but amazon says item weight is 1.76 ounces).
The buck step down converter I use that is able to handle up to 12A does weigh 81g ...
With a buck converter attached to the drone, you would not need the thicker cables.
In case the buck converter would be 15g as you said it would be even heavier than the 12.8g of the lipo shipped with the drone. With the additional cable weight that might avoid drone take off due to overload.
I did order recently a 150W 12V (12.5A) mains adapter from Amazon which seemed to be a better fit than the 170W 20V (8.5A) laptop mains adapter because I am only interested in 3.7-4.2V in the end. Unfortunately on first connection to mains it gave a very loud bang and blowed the room fuse. I already got it retruned and refunded, waiting for the reorder to arrive.
You are going to buy another drone, to find a drone that was lost while finding an RC aircraft.. Perhaps you need to stop flying near trees? :lol:
Anyway, new FPV Eachine E52 drone (only 20$ with free shipping during banggood super sale!) arrived and I already did first flight exercises. Camera FPV on android smartphone should find the lost RC drone in 5-10m high small group of trees and rescue with 7m long ladder. And hopefully later get better location of 20m height tree RC airplane location and probably help in rescue that as well.
These are three slowed down from 30fps to 6fps parts from >60 flights that showed the airplane. First airplane enters scene from top right to middle right hidden by leaves, then plane enters frame from middle top and leaves top left, and finally plane enters from middle top and leaves middle top:
I did quite some more excercise flights, no problem after I spent 24$ (more than for the E52 itself) for 5 lipos with 5xcharger cable:
Taking videos in the evening after sunset had some issues wrt contrast when heaven comes into view, but the camera resolution was a surprise, 720x576 is 0.4MP and not the the 0.3MP from E52 description:
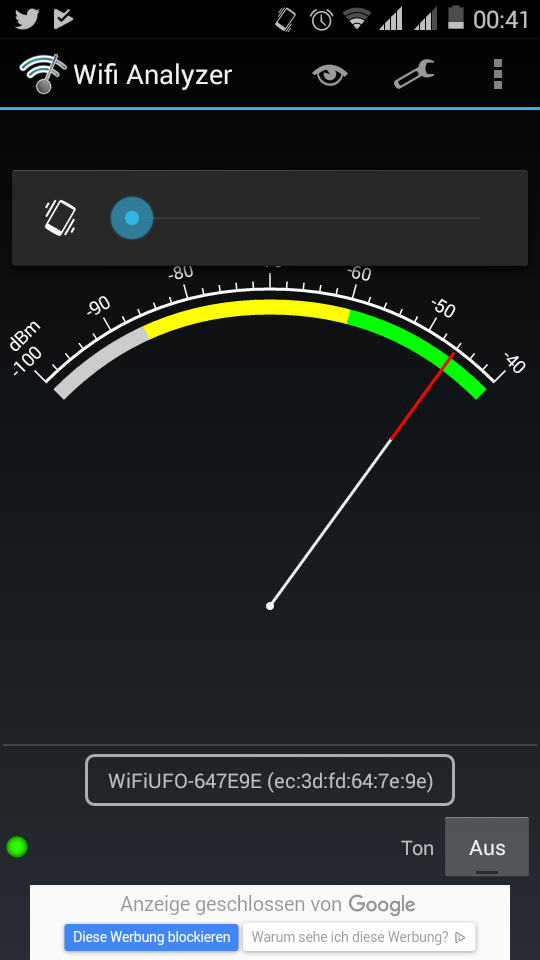
I did it again today, lost the drone two times, in high grass this time and not in trees. The turn drone motor on/off trick I used to acoustically locate the other drone did not work. But since the drone is an access point I used the Wifi strength (very coarse, 0-4 arcs) to find the drone both times (turn WLAN off in Android, then on again)! For the next searches I am better prepared after installing Wifi Analyzer app, much more fine grained connection information (here tested with drone at home from next room):
Today the reordered 150W 12V (12.5A) mains adapter arrived as well, worked this time without issues. Will try that after having found and rescued the first lost drone with buck step down converter instead of the 170W 20V (8.5A) laptop power adapter.