Hello, I'm making Balancing robot with Arduino UNO. I'm using a gyro sensor to MPU6050 and 2 DC motors. They connected with 2A L298N motor driver. Also, using 6 AA batteries.
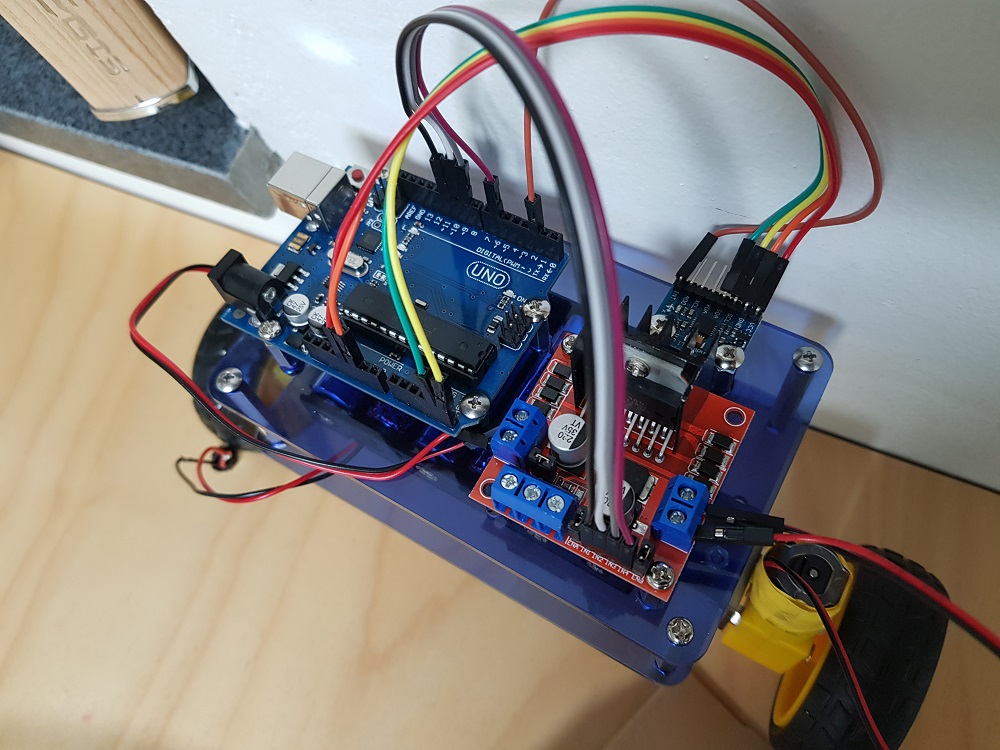
When I upload a sketch and connect power, It cannot function. Error got 2 types. One is motor spin only one direction. when it happens, serial monitor doesn't print any single lines. Another one is gyro angle value print to randomly, so motor just vibration.
I changed all parts new one. Even When I changed Arduino UNO, It's still not functional. The funny thing is, When I am making a first Balancing robot, It works so well. This is my second balancing robot and It didn't work. What am I missing?
here is my sketch and I'll attach current used libraries.
#include "I2Cdev.h"
#include <PID_v1.h>
#include "MPU6050_6Axis_MotionApps20.h"
MPU6050 mpu;
// MPU control/status vars
bool dmpReady = false; // set true if DMP init was successful
uint8_t mpuIntStatus; // holds actual interrupt status byte from MPU
uint8_t devStatus; // return status after each device operation (0 = success, !0 = error)
uint16_t packetSize; // expected DMP packet size (default is 42 bytes)
uint16_t fifoCount; // count of all bytes currently in FIFO
uint8_t fifoBuffer[64]; // FIFO storage buffer
// orientation/motion vars
Quaternion q; // [w, x, y, z] quaternion container
VectorFloat gravity; // [x, y, z] gravity vector
float ypr[3]; // [yaw, pitch, roll] yaw/pitch/roll container and gravity vector
//setting PID parameter
double setpoint= 171;
double Kp = 21;
double Kd = 0.8;
double Ki = 140;
double input, output;
PID pid(&input, &output, &setpoint, Kp, Ki, Kd, DIRECT);
volatile bool mpuInterrupt = false;
void dmpDataReady()
{
mpuInterrupt = true;
}
void setup() {
Serial.begin(115200);
Serial.println(F("Initializing I2C devices..."));
mpu.initialize();
Serial.println(F("Testing device connections..."));
Serial.println(mpu.testConnection() ? F("MPU6050 connection successful") : F("MPU6050 connection failed"));
devStatus = mpu.dmpInitialize();
mpu.setXGyroOffset(220);
mpu.setYGyroOffset(76);
mpu.setZGyroOffset(-85);
mpu.setZAccelOffset(1688);
if (devStatus == 0)
{
Serial.println(F("Enabling DMP..."));
mpu.setDMPEnabled(true);
Serial.println(F("Enabling interrupt detection (Arduino external interrupt 0)..."));
attachInterrupt(0, dmpDataReady, RISING);
mpuIntStatus = mpu.getIntStatus();
Serial.println(F("DMP ready! Waiting for first interrupt..."));
dmpReady = true;
packetSize = mpu.dmpGetFIFOPacketSize();
pid.SetMode(AUTOMATIC);
pid.SetSampleTime(10);
pid.SetOutputLimits(-255, 255);
}
else
{
Serial.print(F("DMP Initialization failed (code "));
Serial.print(devStatus);
Serial.println(F(")"));
}
pinMode (6, OUTPUT);
pinMode (9, OUTPUT);
pinMode (10, OUTPUT);
pinMode (11, OUTPUT);
analogWrite(6,LOW);
analogWrite(9,LOW);
analogWrite(10,LOW);
analogWrite(11,LOW);
}
String receivedValue;
bool motorPrint = true;
void loop() {
if (!dmpReady) return;
while (!mpuInterrupt && fifoCount < packetSize)
{
pid.Compute();
if(motorPrint==true)
{
Serial.print(input); Serial.print(" =>"); Serial.println(output);
}
if (input>150 && input<200){
if (output>0)
Forward();
else if (output<0)
Reverse();
}
else
Stop();
}
// reset interrupt flag and get INT_STATUS byte
mpuInterrupt = false;
mpuIntStatus = mpu.getIntStatus();
// get current FIFO count
fifoCount = mpu.getFIFOCount();
// check for overflow (this should never happen unless our code is too inefficient)
if ((mpuIntStatus & 0x10) || fifoCount == 1024)
{
// reset so we can continue cleanly
mpu.resetFIFO();
Serial.println(F("FIFO overflow!"));
// otherwise, check for DMP data ready interrupt (this should happen frequently)
}
else if (mpuIntStatus & 0x02)
{
// wait for correct available data length, should be a VERY short wait
while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount();
// read a packet from FIFO
mpu.getFIFOBytes(fifoBuffer, packetSize);
// track FIFO count here in case there is > 1 packet available
// (this lets us immediately read more without waiting for an interrupt)
fifoCount -= packetSize;
mpu.dmpGetQuaternion(&q, fifoBuffer); //get value for q
mpu.dmpGetGravity(&gravity, &q); //get value for gravity
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity); //get value for ypr
input = ypr[1] * 180/M_PI + 180;
}
delay(1);
}
void Forward()
{
analogWrite(6,output);
analogWrite(9,0);
analogWrite(10,output);
analogWrite(11,0);
//Serial.print("F");
}
void Reverse()
{
analogWrite(6,0);
analogWrite(9,output*-1);
analogWrite(10,0);
analogWrite(11,output*-1);
// Serial.print("R");
}
void Stop()
{
analogWrite(6,0);
analogWrite(9,0);
analogWrite(10,0);
analogWrite(11,0);
// Serial.print("S");
}
MPU6050.zip (81.2 KB)
I2Cdev.zip (14.3 KB)
Arduino-PID.zip (8.35 KB)