teil 2:
case 1:
// LCD - Ausgabe
// lcd.clear();
lcd.setCursor(0, 0);
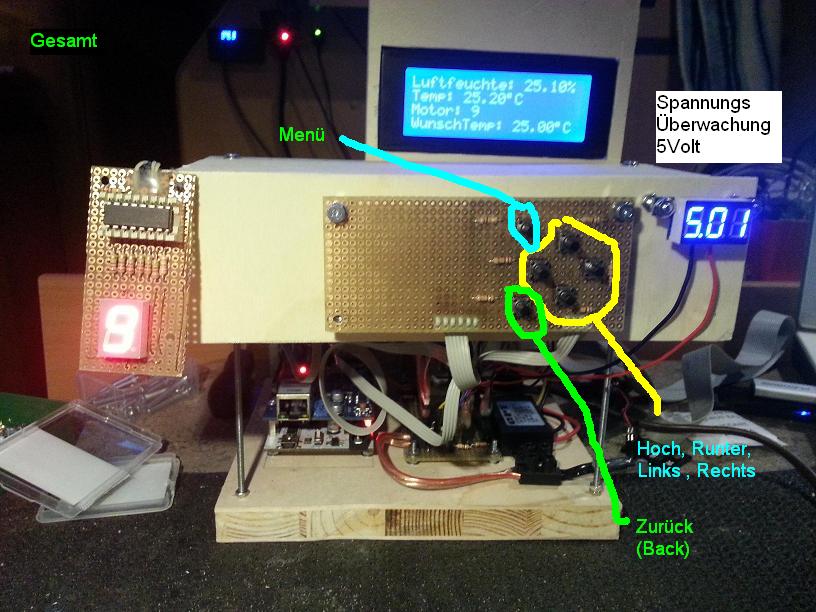
lcd.print("Luftfeuchte: ");
lcd.print(hx);
lcd.print("%");
lcd.setCursor(0, 1);
lcd.print("Temp: ");
lcd.print(tempx); // DHT22
lcd.write(grad);
lcd.print("C");
lcd.setCursor(0, 2);
lcd.print("Motor: ");
lcd.print(wert);
lcd.setCursor(0, 3);
lcd.print("WunschTemp: ");
lcd.print(wunschtemp);
lcd.write(grad);
lcd.print("C");
// Relais
digitalWrite(relaisA, HIGH);
digitalWrite(relaisB, HIGH);
// LED Shift-Register
digitalWrite(speicherPin, LOW);
shiftOut(datenPin, taktPin, LSBFIRST, FEHLER);
digitalWrite(speicherPin, HIGH);
// --- WERT - beginn ---
tasterobenX = digitalRead(tasteroben);
tasteruntenX = digitalRead(tasterunten);
if(tasterobenX == HIGH)
{
wert++;
wert = min(9, wert); // wert MINIMIERT auf 9
delay(20);
}
if(tasteruntenX == HIGH)
{
wert--;
wert = max(0, wert); // wert MAXIMIERT auf 0
delay(20);
}
// --- WERT Berechnung - ende ---
// ~~~ ZURÜCK - begin ~~~
tasterbackX = digitalRead(tasterback);
if(tasterbackX == HIGH)
{
casewert = 0;
break;
}
// ~~~ ZURÜCK - ende ~~~
// ########## MENU - ende ##########
//------------------------------------------------------------------
// ######### BEARBEITUNG - begin ##########
case 0:
// DHT22 - einlesen
float h = dht.readHumidity();
float temp = dht.readTemperature();
tempx = temp;
hx = h;
// Relais
if(temp <= wunschtemp) // wenn gemessene "temp" kleiner als "wunschtemp"
{
digitalWrite(relaisB, LOW); // schalte relais ein (LOW = EIN)
}
if(temp >= (wunschtemp + 1.00)) // wenn gemessene "temp" größer als "wunschtemp"
{
digitalWrite(relaisB, HIGH); // chalte relais aus (HIGH = AUS)
}
// LCD - Ausgabe
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Luftfeuchte: ");
lcd.print(hx);
lcd.print("%");
lcd.setCursor(0, 1);
lcd.print("Temp: ");
lcd.print(tempx); // DHT22
lcd.write(grad);
lcd.print("C");
lcd.setCursor(0, 2);
lcd.print("Motor: ");
lcd.print(wert);
lcd.setCursor(0, 3);
lcd.print("WunschTemp: ");
lcd.print(wunschtemp);
lcd.write(grad);
lcd.print("C");
// ~~~ ZURÜCK - begin ~~~
tastermenuX = digitalRead(tastermenu);
if(tastermenuX == HIGH)
{
moduswert = 1;
break;
}
// ~~~ ZURÜCK - ende ~~~
//+ + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + +
// ##### IF 0 - beginn #####
if(wert == 0){
// LED Shift-Register
digitalWrite(speicherPin, LOW);
shiftOut(datenPin, taktPin, LSBFIRST, Null);
digitalWrite(speicherPin, HIGH);
// Motor
analogWrite(motor, 0);
}
// ##### IF 0 - ende #####
// ##### IF 1 - beginn #####
if(wert == 1){
// LED Shift-Register
digitalWrite(speicherPin, LOW);
shiftOut(datenPin, taktPin, LSBFIRST, eins);
digitalWrite(speicherPin, HIGH);
// Motor
analogWrite(motor, 20);
}
// ##### IF 1 - ende #####
// ##### IF 2 - beginn #####
if(wert == 2){
// LED Shift-Register
digitalWrite(speicherPin, LOW);
shiftOut(datenPin, taktPin, LSBFIRST, zwei);
digitalWrite(speicherPin, HIGH);
// Motor
analogWrite(motor, 40);
}
// ##### IF 2 - ende #####
// ##### IF 3 - beginn #####
if(wert == 3){
// LED Shift-Register
digitalWrite(speicherPin, LOW);
shiftOut(datenPin, taktPin, LSBFIRST, drei);
digitalWrite(speicherPin, HIGH);
// Motor
analogWrite(motor, 60);
}
// ##### IF 3 - ende #####
// ##### IF 4 - beginn #####
if(wert == 4){
// LED Shift-Register
digitalWrite(speicherPin, LOW);
shiftOut(datenPin, taktPin, LSBFIRST, vier);
digitalWrite(speicherPin, HIGH);
// Motor
analogWrite(motor, 80);
}
// ##### IF 4 - ende #####
// ##### IF 5 - beginn #####
if(wert == 5){
// LED Shift-Register
digitalWrite(speicherPin, LOW);
shiftOut(datenPin, taktPin, LSBFIRST, fuenf);
digitalWrite(speicherPin, HIGH);
// Motor
analogWrite(motor, 100);
}
// ##### IF 5 - ende #####
// ##### IF 6 - beginn #####
if(wert == 6){
// LED Shift-Register
digitalWrite(speicherPin, LOW);
shiftOut(datenPin, taktPin, LSBFIRST, sechs);
digitalWrite(speicherPin, HIGH);
// Motor
analogWrite(motor, 120);
}
// ##### IF 6 - ende #####
// ##### IF 7 - beginn #####
if(wert == 7){
// LED Shift-Register
digitalWrite(speicherPin, LOW);
shiftOut(datenPin, taktPin, LSBFIRST, sieben);
digitalWrite(speicherPin, HIGH);
// Motor
analogWrite(motor, 140);
}
// ##### IF 7 - ende #####
// ##### IF 8 - beginn #####
if(wert == 8){
// LED Shift-Register
digitalWrite(speicherPin, LOW);
shiftOut(datenPin, taktPin, LSBFIRST, acht);
digitalWrite(speicherPin, HIGH);
// Motor
analogWrite(motor, 160);
}
// ##### IF 8 - ende #####
// ##### IF 9 - beginn #####
if(wert == 9){
// LED Shift-Register
digitalWrite(speicherPin, LOW);
shiftOut(datenPin, taktPin, LSBFIRST, neun);
digitalWrite(speicherPin, HIGH);
// Motor
digitalWrite(motor, HIGH);
}
// ##### IF 9 - ende #####
}