Erni:
This is the inverter I use.
Both resistors are 1k
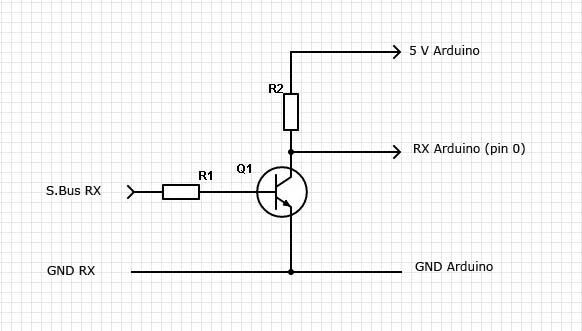
Nice to know this'll work instead of going with an 74HC14 or something.
Erni:
This is the inverter I use.
Both resistors are 1k
Nice to know this'll work instead of going with an 74HC14 or something.
That's also good as a 12V driver for P-channel MOSFET to switch on higher voltage/current loads.
Pull up to 12V tho.
Hi
I have problem to get this work properly. I get nothing back on the serial-port when I try this code:
#include <FUTABA_SBUS.h>
#include <Streaming.h>
FUTABA_SBUS sBus;
void setup(){
sBus.begin();
Serial.begin(115200);
}
void loop(){
sBus.FeedLine();
if (sBus.toChannels == 1){
sBus.UpdateServos();
sBus.UpdateChannels();
sBus.toChannels = 0;
Serial<<sBus.channels[0]<<","<<sBus.channels[1]<<","<<sBus.channels[2]<<"\r\n";
}
}
But when I change in the end of the FUTABA_SBUS.ccp file from this:
if (bufferIndex == 24){
feedState = 0;
if (inBuffer[0]==0x0f && inBuffer[24] == 0x00){
memcpy(sbusData,inBuffer,25);
toChannels = 1;
}
}
to this where I comment out the "&& inBuffer[24] == 0x00" like this:
if (bufferIndex == 24){
feedState = 0;
if (inBuffer[0]==0x0f){ // && inBuffer[24] == 0x00){
memcpy(sbusData,inBuffer,25);
toChannels = 1;
}
}
It works
I guess the "&& inBuffer[24] == 0x00" statement is to check the end of the string to be sure that it is changed to 0x00, it is earlier in the code set to 0xFF like this:
else{
bufferIndex = 0;
inBuffer[bufferIndex] = inData;
inBuffer[24] = 0xff;
feedState = 1;
}
I have a Futaba R7008SB-reciver. What can be wrong? Someone that have any idea?
After sending the whole string I see that it looks like this:
0F E5 43 9F FA 02 08 16 18 02 10 80 00 04 20 00 01 08 07 38 00 10 80 00 04
0F E5 43 9F FA 02 08 16 18 02 10 80 00 04 20 00 01 08 07 38 00 10 80 00 14
0F E5 43 9F FA 02 08 16 18 02 10 80 00 04 20 00 01 08 07 38 00 10 80 00 24
0F E5 43 9F FA 02 08 16 18 02 10 80 00 04 20 00 01 08 07 38 00 10 80 00 34
0F E5 43 9F FA 02 08 16 18 02 10 80 00 04 20 00 01 08 07 38 00 10 80 00 04
0F E5 43 9F FA 02 08 16 18 02 10 80 00 04 20 00 01 08 07 38 00 10 80 00 14
0F E5 43 9F FA 02 08 16 18 02 10 80 00 04 20 00 01 08 07 38 00 10 80 00 24
0F E5 43 9F FA 02 08 16 18 02 10 80 00 04 20 00 01 08 07 38 00 10 80 00 34
0F in the begining is the start bit, the next 22 bytes are the channels(22bytes x 8bits=176bits, 176bits/11-bits = 16 11-bit channels), then the next byte is 00 all the time, but that is in this case byte 23 and not 24 so I changed to this:
if (inBuffer[0]==0x0f && inBuffer[23] == 0x00) //Changed to 23 instead of 24
That works!
But the last byte, it is going 04, 14, 24, 34 all the time. Anyone know why it is like that?
Edit: Hmmm byte 23 is the failsafe-bit so thats why that one is 00, if failsafe will activate it will change. So why is the last byte changing like that?
Glattnos:
...But the last byte, it is going 04, 14, 24, 34 all the time. Anyone know why it is like that?
Edit: Hmmm byte 23 is the failsafe-bit so thats why that one is 00, if failsafe will activate it will change. So why is the last byte changing like that?
Don't actually know what that byte is exactly. Am using FrSky and Spektrum.
But Have you recognized that your byte is always cycling '04, 14, 24, 34, 04, ...'?
Seem like a rolling counter or something. Maybe some watchdog functionality for receiving bus members?
Maybe only first byte is counter '0x, 1x, ...' and second byte is something like a status byte 'y4, (y+1)4, ...' and changing when receiver is connected to TX or in binded state or something else?
Just my late night thoguths ![]()
Regards
Hi guys,
It is pretty cool this works!
Now that its know how it works is there any wat to reverse this and use it to send the sbus data from the arduino to a transmitter? something like a frsky xjt transmitter?
I would love to make a transmitter that way, send button or pulse signals to the arduino and finally send them converted in sbus to the xjt transmitter!
Sorry if my english is confusing im from the netherlands and not that good with this language..
Also pretty new to this forum lol!
Hope somebody had a idea/anwser to this, or maybe work something out together?
Cheers!
is there any wat to reverse this and use it to send the sbus data from the arduino
You can genrate the SBUS data on an Arduino by using this sketch:
If you want to make a FrSky like transmitter, you could just Flash OpenTX on an Arduino Mega:
Thank you very much erni.
You gave me so much good info!
I will take a look at it and if i come any furter i will update you.
Hello guys,
i read some posts in this thread, and focused on the HW side - seems like a logic inverter is needed.
is there a way to run Sbus codes on a Pro Mini with no external HW?
i know the pro mini can do at least 2 PWM outputs, but im actually looking at going a different way and use the Arduino Pro mini to gather serial data from Jetcat ECU and convert it to SBUS protocol for telemtry.
i already did the Jetcat serial communication side when i did my mini GSU project:

i3dm:
is there a way to run Sbus codes on a Pro Mini with no external HW?
I am afraid the answer is no
Hi everyone! I am trying to use the described method to read my x4rsb receiver for my project. I was able from time to time read good values, but often I was received just a bunch of lost frames and errors. So I was trying to dig in that, and first of all I found, that not all the time 0F is the first byte, sometimes it's in the middle of the row:
0F E4 EB 1E 2B B2 C7 0A F1 B1 82 15 AC 18 1F F8 C0 07 3E F0 81 0F 7C 0 0
0F E4 E3 1E 2B B2 C7 0A F1 B1 82 15 AC 10 1F F8 C0 07 3E F0 81 0F 7C 0 0
0F E4 E3 1E 2B B2 C7 0A F1 B1 82 15 AC 08 1F F8 C0 07 3E F0 81 0F 7C 0 0
0F E4 EB 1E 2B B0 C7 8A F0 B1 82 15 AC 18 1F F8 C0 07 3E F0 81 0F 7C 0 0
0F E4 EB 1E 2B B2 C7 0A F1 B1 82 15 AC 10 1F F8 C0 07 3E F0 81 0F 7C 0 0
Ok, not the worse, but I decided to make a snake-line class, that will eat bytes one by one and pop them,if there is no place inside. I don't know, is there something ready for that, but it's really easy to implement. The goal was to catch byte row and check, if first and last byte are start and stop bytes. So, if true, we can decode the bytes the way it's done in the sbus library mentioned above;
my sbus.cpp
#include "SBUS2.h"
#include <Arduino.h>
void SBUS::begin() {
SBUS::begin(true);
}
void SBUS::begin(bool useTimer) {
//wiffer.begin();
if (useTimer) {
noInterrupts();
/*TCCR2A = 0;
TCCR2B = 0;
TCNT2 = 0;
OCR2A = 249;
TCCR2A |= (1 << WGM21);
TCCR2B |= (1 << CS22);
TIMSK2 |= (1 << OCIE2A);*/
interrupts();
}
for (byte i = 0; i<18; i++) {
_channels[i] = 0;
}
_goodFrames = 0;
_lostFrames = 0;
_decoderErrorFrames = 0;
_failsafe = SBUS_FAILSAFE_INACTIVE;
_serial.begin(100000, SERIAL_8E1_RXINV_TXINV);
}
void SBUS::process() {
static byte buffer[25];
static byte buffer_index = 0;
wiffer.begin();//reset wiffer again
while (_serial.available()) {
byte rx = _serial.read();
wiffer.push(rx);
for (int i = 0; i < WIFFER_LENGTH; ++i)
{
Serial.print(String(wiffer.get(i), HEX));
Serial.print(' ');
}
Serial.println('--');
if (!wiffer.full()){
continue;
}
if (wiffer.first() == SBUS_STARTBYTE && wiffer.last() == SBUS_ENDBYTE){
Serial.println('???');
for (int i = 1; i < 25; ++i)
{
buffer[i] = wiffer.get(i);
}
_decoderErrorFrames += wiffer.lost();
_goodFrames += 26;
wiffer.begin();
_bytes=' ';
for (int i = 0; i < 25; ++i)
{
_bytes= _bytes + ' ' + String(buffer[i], HEX);
}
_channels[0] = ((buffer[1] |buffer[2]<<8) & 0x07FF);
_channels[1] = ((buffer[2]>>3 |buffer[3]<<5) & 0x07FF);
_channels[2] = ((buffer[3]>>6 |buffer[4]<<2 |buffer[5]<<10) & 0x07FF);
_channels[3] = ((buffer[5]>>1 |buffer[6]<<7) & 0x07FF);
_channels[4] = ((buffer[6]>>4 |buffer[7]<<4) & 0x07FF);
_channels[5] = ((buffer[7]>>7 |buffer[8]<<1 |buffer[9]<<9) & 0x07FF);
_channels[6] = ((buffer[9]>>2 |buffer[10]<<6) & 0x07FF);
_channels[7] = ((buffer[10]>>5|buffer[11]<<3) & 0x07FF);
_channels[8] = ((buffer[12] |buffer[13]<<8) & 0x07FF);
_channels[9] = ((buffer[13]>>3|buffer[14]<<5) & 0x07FF);
_channels[10] = ((buffer[14]>>6|buffer[15]<<2|buffer[16]<<10) & 0x07FF);
_channels[11] = ((buffer[16]>>1|buffer[17]<<7) & 0x07FF);
_channels[12] = ((buffer[17]>>4|buffer[18]<<4) & 0x07FF);
_channels[13] = ((buffer[18]>>7|buffer[19]<<1|buffer[20]<<9) & 0x07FF);
_channels[14] = ((buffer[20]>>2|buffer[21]<<6) & 0x07FF);
_channels[15] = ((buffer[21]>>5|buffer[22]<<3) & 0x07FF);
((buffer[23]) & 0x0001) ? _channels[16] = 2047: _channels[16] = 0;
((buffer[23] >> 1) & 0x0001) ? _channels[17] = 2047: _channels[17] = 0;
if ((buffer[23] >> 3) & 0x0001) {
_failsafe = SBUS_FAILSAFE_ACTIVE;
} else {
_failsafe = SBUS_FAILSAFE_INACTIVE;
}
if ((buffer[23] >> 2) & 0x0001) {
_lostFrames++;
}
_lastGoodFrame = millis();
}
}
}
int SBUS::getChannel(int channel) {
if (channel < 1 or channel > 18) {
return 0;
} else {
return _channels[channel - 1];
}
}
int SBUS::getNormalizedChannel(int channel) {
if (channel < 1 or channel > 18) {
return 0;
} else {
return (int) lround(_channels[channel - 1] / 9.92) - 100; //9.92 or 10.24?
}
}
int SBUS::getFailsafeStatus() {
return _failsafe;
}
int SBUS::getFrameLoss() {
return (int) ((_lostFrames + _decoderErrorFrames) * 100 / (_goodFrames + _lostFrames + _decoderErrorFrames));
}
long SBUS::getGoodFrames() {
return _goodFrames;
}
long SBUS::getLostFrames() {
return _lostFrames;
}
long SBUS::getDecoderErrorFrames() {
return _decoderErrorFrames;
}
long long SBUS::getLastTime() {
return _lastGoodFrame;
}
String SBUS::getBytes() {
return _bytes;
}
//WIFFER
void WIFFER::begin(){
_pointer = -1;
_count = 0;
_eternal = 0;
for (int i = 0; i < WIFFER_LENGTH; ++i)
{
_data[i] = 0;
}
}
void WIFFER::push(byte item){
_pointer++;
_eternal++;
if (_count<WIFFER_LENGTH){
_count++;
}
if (_pointer == WIFFER_LENGTH){
_pointer = 0;
}
_data[_pointer] = item;
}
byte WIFFER::get(int index){
int target = (_pointer + 1 + index) % WIFFER_LENGTH;
return _data[target];
}
byte WIFFER::first(){
if (_count<WIFFER_LENGTH){
return _data[0];
}else{
if (_pointer + 1 < WIFFER_LENGTH){
return _data[_pointer + 1];
}else{
return _data[0];
}
}
}
byte WIFFER::last(){
return _data[_pointer];
}
int WIFFER::length(){
return _count;
}
bool WIFFER::full(){
return (_count == WIFFER_LENGTH);
}
unsigned long WIFFER::lost(){
return _eternal - _count;
}
Don't be surprised, the code is used on teensy board, so I have a little bit different hardware;
Whoa, it's working, but I am not sure about counting good and bad frames (i am counting bytes instead).
Lastly, I uploaded the code, and found that strange thing (0F is replaced to -- for the ease of reading).
-- E5 E3 1E 2B AE C7 0A 56 B0 82 15 AC 60 05 F8 C0 07 3E F0 81 8F 15 00 00
-- E5 E3 1E 2B AE C7 0A 56 B0 82 15 AC 60 05 F8 C0 07 3E F0 81 8F 15 00 00
-- E4 E3 1E 2B B0 C7 0A 56 B0 82 15 AC 60 05 F8 C0 07 3E F0 81 8F 15 00 00
-- E4 E3 1E 2B B0 C7 0A 56 B0 82 15 AC 60 05 F8 C0 07 3E F0 81 8F 15 00 00
-- E4 E3 1E 2B B0 C7 0A 56 B0 82 15 AC 60 05 F8 C0 07 3E F0 81 8F 15 00 00
-- E4 E3 1E 2B B0 C7 0A 56 B0 82 15 AC 60 05 F8 C0 07 3E F0 81 8F 15 00 00
-- E5 E3 1E 2B AE C7 0A 56 B0 82 15 AC 60 05 F8 C0 07 3E F0 81 8F 15 00 --
-- E5 E3 1E 2B AE C7 0A 56 B0 82 15 AC 60 05 F8 C0 07 F0 00 -- E5 E3 1E 2B
-- E5 E3 1E 2B AE C7 0A 56 B0 82 15 AC 60 05 F8 C0 07 3E 15 -- E5 E3 1E 2B
-- E5 E3 1E 2B AE C7 0A 56 B0 82 15 AC 60 05 F8 C0 07 3E F0 81 8F 00 -- E5
-- E5 E3 1E 2B AE C7 0A 56 B0 82 15 AC 60 05 F8 C0 07 3E F0 8F 00 -- E5 E3
-- E5 E3 1E 2B AE C7 0A 56 B0 82 15 AC 60 05 F8 C0 07 3E F0 8F -- E5 E3 1E
-- E5 E3 1E 2B AE C7 0A 56 B0 82 15 AC 60 05 F8 C0 07 3E F0 81 15 -- E4 E3
-- E4 E3 1E 2B B0 C7 0A 56 B0 82 15 AC 60 05 F8 C0 07 3E F0 81 15 -- E4 E3
-- E4 E3 1E 2B B0 C7 0A 56 B0 82 15 AC 60 05 F8 C0 07 3E F0 81 00 -- E5 E3
-- E5 E3 1E 2B AE C7 0A 56 B0 82 15 AC 60 05 F8 C0 07 3E F0 81 00 -- E5 E3
-- E5 E3 1E 2B AE C7 0A 56 B0 82 15 AC 60 05 F8 C0 07 3E F0 8F 00 -- E5 E3
-- E5 E3 1E 2B B0 C7 0A 56 B0 82 15 AC 60 05 F8 C0 07 3E F0 8F -- E5 E3 1E
-- E5 E3 1E 2B B0 C7 0A 56 B0 82 15 AC 60 05 F8 C0 07 3E F0 81 15 -- E5 E3
-- E5 E3 1E 2B AE C7 0A 56 B0 82 15 AC 60 05 F8 C0 07 3E F0 81 15 -- E5 E3
-- E5 E3 1E 2B AE C7 0A 56 B0 82 15 AC 60 05 F8 C0 07 3E F0 81 00 -- E5 D3
-- E5 D3 1E 2B AE C7 0A 56 B0 82 15 AC 60 05 F8 C0 07 3E F0 81 00 -- E5 D3
-- E5 D3 1E 2B AE C7 0A 56 B0 82 15 AC 60 05 F8 C0 07 3E F0 8F 00 -- E4 E3
-- E4 E3 1E 2B AE C7 0A 56 B0 82 15 AC 60 05 F8 C0 07 3E F0 15 -- E4 E3 1E
-- E4 E3 1E 2B AE C7 0A 56 B0 82 15 AC 60 05 F8 C0 07 3E F0 81 15 -- E4 E3
-- E4 E3 1E 2B B0 C7 0A 56 B0 82 15 AC 60 05 F8 C0 07 3E F0 81 00 -- E4 E3
-- E4 E3 1E 2B B0 C7 0A 56 B0 82 15 AC 60 05 F8 C0 07 3E F0 81 00 -- E5 03
-- E5 03 1F 2B AE C7 0A 56 B0 82 15 AC 60 05 F8 C0 07 3E F0 81 00 -- E5 03
-- E5 03 1F 2B AE C7 0A 56 B0 82 15 AC 60 05 F8 C0 07 3E F0 8F 00 -- E5 E3
-- E5 E3 1E 2B B0 C7 0A 56 B0 82 15 AC 60 05 F8 C0 07 3E F0 8F -- E5 E3 1E
Any ideas, why it's shorter? Why the length is not constant (but there is clearly an order in that), and what should I do with that stuff now?
Can someone tell me, if I am doing something wrong, or am I messed with the code?
May be there is something in frsky sbus, that is not described? :o
I solved all the problems and, at last, my code is working good, as expected.
The problem was in too fast buffer polling (I downclocked the timer) and mostly in some kind of buffer overflow, as the reading buffer to the end on the starting of lost frame avalanche is making it work again.
Hi all,
I have a fairly simple application but I'm not using these RC parts most of you appear to be using; so can I ask that you first clarify a few things:
@mikesbaker has posted a library zip file in #5, uploaded a library to github in #8, posted what appears to be half a library to pastebin in #29 and posted another library to a different Github account in #52 (!). I've toyed with the two different libraries posted to Github and while both have an example sketch, neither is marked-up, and neither appears to have an example of writing to a channel.
I mean no offense, @mikesbaker - you are clearly the authority on all this! It just would be lovely to have a cohesive "If you want to read s.bus try this, if you want to write to s.bus try this.."
So, this is my scenario. A newish camera from Blackmagic Design - the Micro Studio Camera - has a s.bus connection on it's expansion port breakout. The menu on the camera allows you to assign s.bus channels to different functions (iris, focus, white balance etc). I just want to get in and tell it what to do. There is just one s.bus pin with an accompanying ground wire, so it's either Rx only, or it's full duplex.
Answers to questions 1 and 2 above will get me a long way, and perhaps a pointer to the best library and some tips on establishing if I've got comms would be great. I have a 74HC14 inverter and a voltage level shifter (not yet sure if level shift will be necessary) at the ready and I know these are working and the polarity is correct.
Many thanks in advance..
Thank you for sharing your amazing work! I have a question, may be it is already being answered, please bare with me I am new to this ![]() . From my understanding, the Sbus Protocol is a 25bytes data with 12 bits per byte and 12 X 25= 300 bits. I am trying to make Arduino communicating with NAZE 32 flight controller by using Sbus. Basically, if a ultra-sonic sensor is being used to measure the height and id it is below certain preset value, it will send a signal to increase the throttle automatically. It is a little bit confuse here, since many of the post mentioned that the Sbus data is something like this:
. From my understanding, the Sbus Protocol is a 25bytes data with 12 bits per byte and 12 X 25= 300 bits. I am trying to make Arduino communicating with NAZE 32 flight controller by using Sbus. Basically, if a ultra-sonic sensor is being used to measure the height and id it is below certain preset value, it will send a signal to increase the throttle automatically. It is a little bit confuse here, since many of the post mentioned that the Sbus data is something like this:
0x0F5C9126377FA46AAB00108000042000010870000210800C00 this is not 300 bits data and where is the start bit, paritybit and stop bit?
S-BUS protocol
The protocol is 25 Byte long and is send every 14ms (analog mode) or 7ms (highspeed mode).
One Byte = 1 startbit + 8 databit + 1 paritybit + 2 stopbit (8E2), baudrate = 100'000 bit/s
The highest bit is send first. The logic is inverted (Level High = 1)
[startbyte] [data1] [data2] .... [data22] [flags][endbyte]
startbyte = 11110000b (0xF0)
data 1-22 = [ch1, 11bit][ch2, 11bit] .... [ch16, 11bit] (ch# = 0 bis 2047)
channel 1 uses 8 bits from data1 and 3 bits from data2
channel 2 uses last 5 bits from data2 and 6 bits from data3
etc.
flags = bit7 = ch17 = digital channel (0x80)
bit6 = ch18 = digital channel (0x40)
bit5 = Frame lost, equivalent red LED on receiver (0x20)
bit4 = failsafe activated (0x10)
bit3 = n/a
bit2 = n/a
bit1 = n/a
bit0 = n/a
endbyte = 00000000b
I have tried the code in this link Arduino S-BUS Packet Generator Code - RC Groups However, it will only output 16 random hex number. I do not have any control to it.
Has anyone here managed to get a working SBUS to PPM servo HUB with a nano or ProMini? Or this has absolutely nothing to do with anyone's intention in these posts? Because I've searched for some time and I noticed that this is a frequently requested code and so far I couldn't manage to find an organized project about this.
This would be the reference for what I mean exactly:Green Color 16CH Receiver PWM/PPM/SBUS/DBUS To Signal Converter Module For DJI N Sale - Banggood USA sold out-arrival notice-arrival notice
That would be awesome to use with this:http://www.banggood.com/2_4G-8CH-Compatible-Receiver-for-Futaba-T6J-T8J-T10J-T14SG-S-FHSS-S-SBUS-p-1050812.html?rmmds=search
I really hope to see something about this because a nano board is much cheaper than this converter!
Hi all,
I am trying to implement a sensor to a drone to avoid obstacles. I want to control the pitch channel so that when the drone senses an obstacle in front, the Arduino will overwrite the pitch channel, the drone will pitch up, and move back to avoid the obstacle.
I am using a 8 channel Futaba R2008SB radio receiver. I downloaded the Arduino libraries:
FUTABA_SBUS library: GitHub - mikeshub/FUTABA_SBUS: SBUS driver for arduino
Streaming library: Streaming | Arduiniana
I used a 74LS14 hex inverter.
I connected the SBUS signal of the radio receiver to input of an inverter, the output of the inverter to the RX of the Arduino.
The TX of the Arduino connected to the input of another inverter, the output of the inverter to the RC signal of the Pixhawk.
I opened the serial monitor and set it to 115200 baud, however, there is no numbers displayed on the serial monitor.
I am wondering if the code is suitable for 8 channels, or am I required to modify the code to suit 8 channels? Does the code work if some of the channels between the radio transmitter and the radio receiver are inverted? Also, I am not sure whether my circuit connections are correct.
I do not understand SBUS protocol. I am interested to learn about how the bytes affect the channels.
I hope to receive help please, I would appreciate your help. Thanks.
Below is the code:
#include <FUTABA_SBUS.h>
#include <Streaming.h>
FUTABA_SBUS sBus;
void setup(){
sBus.begin();
Serial.begin(115200);
}
void loop(){
sBus.FeedLine();
if (sBus.toChannels == 1){
sBus.UpdateServos();
sBus.UpdateChannels();
sBus.toChannels = 0;
Serial<<sBus.channels[0]<<","<<sBus.channels[1]<<","<<sBus.channels[2]<<"\r\n";
}
}
Hello
@caiopoit here is a Project you search for. But it is in German:
You have to download the LIB's too, because they where modified for the MICRO!
And copy the Futaba-sbus and RC Dir's into your Arduino-Libs-Dir
The Inverter with npn-Transistor on Top of Page 5 do his work! I Use about 12kohm Pullup and 5,7kohm Basis resistor.
Hey all..
I would be very grateful anyone can help.
I have been using the fantastic Futaba SBUS Library on an Arduino Mega to read channel data from a FRSky X8R / Taranis. I am using the inverter described here.
I get frequent Lockups, where the transmitter will stop responding and my robot will just going until i reset the Arduino. Sometimes after 20 seconds, sometimes after 5 mins. I have built several robots which use this library and I have experienced the same problem on all.
I am using the stock FUTABA_SBUS_h Library and RX SerialPort 3 on the Mega to receive the Sbus Data.
It's starting to drive me crazy. Any help much appreciated.
I have no idea how to debug.
mturneruk:
using the fantastic Futaba SBUS Library on an Arduino Mega to read channel data from a FRSky X8R / Taranis.
...several robots which use this library and I have experienced the same problem on all.
Have you tried a Futaba Tx/Rx? If not you've bet the farm on the skills of the Chinese reverse engineering department. They're notorious for de-engineering things, lowering parts specs, leaving parts out, and changing critical circuit points just to save a few nickels. Which often leads to failure
Hey guys.
I know it's an older thread, but I thought I'll post a version of my Futaba S-BUS Library. It might be useful for some.
The library can be cloned (the latest version) here.
I've attached the latest build, but try and use the one from the above link always as that's going to be the latest version.
Szabi