Hello, I am a 12th grade high school student working on a Sand Table, modeled after this project: https://www.instructables.com/Build-a-Mesmerizing-Sand-Table-a-DIY-Arduino-Maste/
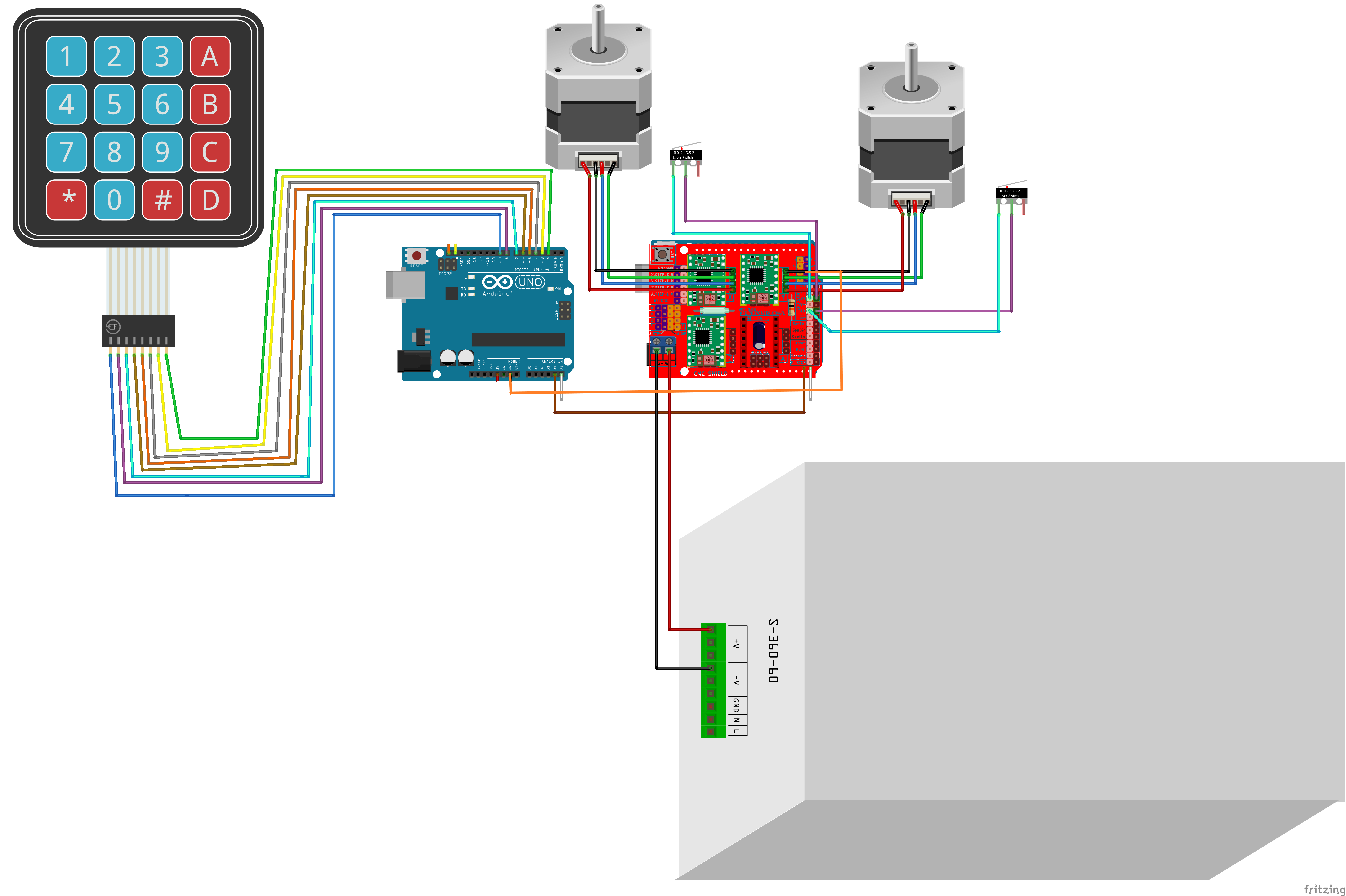
I am using an arduino uno with a keypad to communicate via I2C to an arduino uno and cnc shield, which controls the NEMA 17 stepper motors. I have attached an image, which is from this project: GitHub - maddaxlallatin/grizzlyGuide
The only difference between this wiring and mine is I have omitted the LCD screen and added a wire between the ground pins on the arduino and CNC Shield.

I have run into an issue with my stepper motors where they are turning in the wrong directions inconsistently. They were turning correctly at first, but then after I connected a wire between the two arduinos' GND pins, this issue has began. Even after removing the wire, it has persisted. On the serial monitor, I can see that it always runs the correct function, but it will frequently move in the wrong direction. I don't see a pattern in when/how the motors malfunction, so I am quite lost.
I am very new to this, so any help/suggestions are appreciated! Also, please let me know if I should provide more information about my project.
Here is the code for the keypad arduino:
#include <Wire.h>
#include <Keypad.h>
const byte numRows = 4; // Number of rows on the keypad
const byte numCols = 4; // Number of columns on the keypad
// Keymap for the 4x4 keypad layout
char keymap[numRows][numCols] = {
{'1', '2', '3', 'A'},
{'4', '5', '6', 'B'},
{'7', '8', '9', 'C'},
{'*', '0', '#', 'D'}
};
// Pin assignments for the keypad
byte rowPins[numRows] = {9, 8, 7, 6}; // Rows 0 to 3
byte colPins[numCols] = {5, 4, 3, 2}; // Columns 0 to 3
Keypad myKeypad = Keypad(makeKeymap(keymap), rowPins, colPins, numRows, numCols);
String input = ""; // Store input from the keypad
void setup() {
Serial.begin(9600); // For debugging
Wire.begin(); // Initialize I2C as master
pinMode(LED_BUILTIN, OUTPUT);
}
void loop() {
char key = myKeypad.getKey(); // Get keypress from keypad
if (key) {
Serial.println(key); // Print key to Serial Monitor for debugging
digitalWrite(LED_BUILTIN, HIGH);
delay(100);
digitalWrite(LED_BUILTIN, LOW);
if (key == '#') {
// When "#" is pressed, send input to slave and reset input
sendToSlave(input);
input = ""; // Clear input after sending
}
else if (key == '*') {
// When "*" is pressed, reset the input
input = "";
}
else {
input += key; // Add key to input string
}
}
}
void sendToSlave(String data) {
Wire.beginTransmission(9); // Address of the slave (I2C address 9)
Wire.write(data.c_str()); // Send the input string
Wire.endTransmission(); // End transmission
}
And the motor control arduino:
#include <ezButton.h>
#include <Wire.h>
int num = 1;
int colour = 0; //leds
int button = 0;
int delayMin = 1;
bool homing = false;
int change = 0;
int power = 1;
int pause = 0;
//int right=0;
//int arrayLength = 0;
//float slope = 0;
float m = 0;
float distance = 1;
int dx = 10; // for bounce
int dy = 5;
int width = 165;
int height = 190;
int buttonStateX = 1;
int buttonStateY = 1;
//x , y
//math diameter 15mm
// ONe rotation = 1600 pulses
//int incomingByte = 0;
// defines pins
#define stepPin 2 //x
#define dirPin 5 //x
#define enPin 8 //
#define stepPin2 3 //y
#define dirPin2 6 //y
#define green A0
#define blue A1
#define red A2
#define xSwitch 10
#define ySwitch 9
int speed = 800;
float rotations = 15; //15mm per rotations = 1600 pulses
float x = 0;
float y = 0;
//int x1, y1, x2, y2 = 0;
int ranNum = 0;
//in mm
double turns = (distance / rotations) * 1600;
#define SLAVE_ADDRESS 9 // I2C address for this slave
void setup() {
Serial.println("setup");
Serial.begin(9600);
pinMode(LED_BUILTIN, OUTPUT);
pinMode(green, OUTPUT);
pinMode(red, OUTPUT);
pinMode(blue, OUTPUT);
// Sets the two pins as Outputs
pinMode(stepPin, OUTPUT);
pinMode(dirPin, OUTPUT);
pinMode(stepPin2, OUTPUT);
pinMode(dirPin2, OUTPUT);
pinMode(enPin, OUTPUT);
pinMode(ySwitch, INPUT_PULLUP);
pinMode(xSwitch, INPUT_PULLUP);
digitalWrite(enPin, LOW);
digitalWrite(green, HIGH);
digitalWrite(red, HIGH);
digitalWrite(blue, HIGH);
Wire.begin(SLAVE_ADDRESS); // Initialize I2C as slave with address 9
Wire.onReceive(receiveEvent); // Register a function to handle received data
Serial.println("finished setup");
//home();
}
void receiveEvent(int bytesReceived) {
String receivedData = ""; // Variable to store the received data
while (Wire.available()) {
char c = Wire.read(); // Read one byte from the I2C bus
receivedData += c; // Append the received character to the string
}
//Serial.print("Received: ");
Serial.println(receivedData);
digitalWrite(LED_BUILTIN, HIGH);
delay(100);
digitalWrite(LED_BUILTIN, LOW);
delay(100000);
interpretInput(receivedData); // Print the received data to the Serial Monitor
//home();
}
void interpretInput(String input){
if(input == "0"){
down(5);
}
if(input == "5"){
up(5);
}
if(input == "7"){
left(5);
}
if(input == "9"){
right(5);
}
if(input == "1"){
up(1);
delay(100000);
down(1);
delay(100000);
left(1);
delay(100000);
right(1);
}
if(input == "4"){
up(23);
}
if(input == "6"){
left(20);
}
}
void loop(){
}
/// Basic Functions
void stepperMotor(float distance) {
turns = (distance / rotations) * 1600;
for (int i = 0; i < turns; i++) {
digitalWrite(stepPin, HIGH);
digitalWrite(stepPin2, HIGH);
delayMicroseconds(speed);
digitalWrite(stepPin, LOW);
digitalWrite(stepPin2, LOW);
delayMicroseconds(speed);
while (pause == 1) {
//Serial.println("pause");
};
//if (power==1){return;}
}
}
void right(float distance) {
Serial.println("right");
if (button > 0) { return; }
digitalWrite(dirPin, HIGH); // Enables the motor to move right
digitalWrite(dirPin2, HIGH); // Enables the motor to move right
stepperMotor(distance);
x = x + distance;
}
void up(float distance) {
Serial.println("up");
if (button > 0) { return; }
digitalWrite(dirPin, HIGH); // Enables the motor to move right
digitalWrite(dirPin2, LOW); // Enables the motor to move right/HIGH left/LOW
stepperMotor(distance);
y = y + distance;
}
void down(float distance) {
Serial.println("down");
if (button > 0) { return; }
digitalWrite(dirPin, LOW); // Enables the motor to move right
digitalWrite(dirPin2, HIGH); // Enables the motor to move right/HIGH left/LOW
stepperMotor(distance);
y = y - distance;
}
void left(float distance) {
Serial.println("left");
if (button > 0) { return; }
digitalWrite(dirPin, LOW); //Changes the rotations direction left
digitalWrite(dirPin2, LOW); //Changes the rotations direction left
stepperMotor(distance);
x = x - distance;
}```