Dear ALL, I'm very new on arduino ![]() ,
,
I need help to solve at my project.
Description on my project
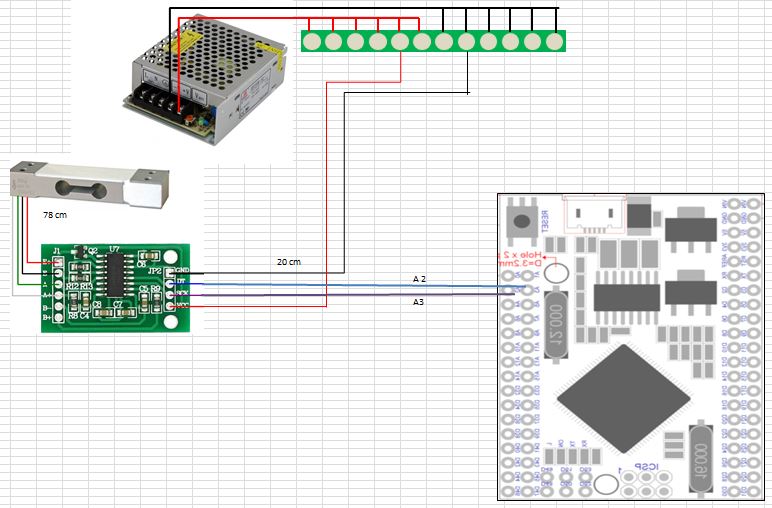
I use load cell, motor stepper (to move chain), motor servo (to reject product), LCD, Keypad
and the Function
If I push button "A" Motor running
If I push button "B" load cell Weighing after 2 second arduino will decided good/bad product and send order to servo to move from position 0 to 90.(problem motor servo can't hold position at least 2 second) another problem how to make motor stepper move after 2 second arduino decide good/bad product)
Problem:
- How to show up the text on LCD while i turn on the motor(Fyi, i already try to combine on void motor i input "program LCD" but the result is LCD blank and motor run very slow?
- How to make servo at pos 90'(bad) little bit hold the position while we push the product?
- How to make stepper move while arduino decide product good/bad?
Thanks
Best Regards
Doni
this is the program:(i combine all programs as possible)
#include <LiquidCrystal_I2C.h>
#include <Wire.h>
#include <Keypad.h>
#include <HX711_ADC.h>
#include <EEPROM.h>
#include <Servo.h>
//Servo
Servo servo;
int pos = 0;
// Keypad
const byte ROWS = 4;
const byte COLS = 4;
char hexaKeys[ROWS][COLS] = {
{'1', '2', '3', 'A'},
{'4', '5', '6', 'B'},
{'7', '8', '9', 'C'},
{'*', '0', '#', 'D'}
};
byte rowPins[ROWS] = {46, 44, 42, 40};
byte colPins[COLS] = {38, 36, 34, 32};
Keypad customKeypad = Keypad( makeKeymap(hexaKeys), rowPins, colPins, ROWS, COLS);
// LCD
LiquidCrystal_I2C lcd(0x27, 20, 4);
//HX711
const int HX711_dout = 6; //mcu > HX711 dout pin
const int HX711_sck = 7; //mcu > HX711 sck pin
const int calVal_calVal_eepromAdress = 0;
long t;
HX711_ADC LoadCell(HX711_dout, HX711_sck);
//Sensor PX dan IR
int ir = 31;
int px = 30;
unsigned long preMil = 0;
unsigned long previousMicros = 0;
const long interval = 1500;
int PULPin = 3; // PUL- pin
int DIRPin = 2; // DIR- pin
int PULState = HIGH;
int B = 0;
float j;
float i;
void setup() {
// servo
servo.attach(9);
// Setup HX711
Serial.begin(9600); delay(10);
Serial.println();
Serial.println("Starting...");
float calibrationValue; // calibration value
calibrationValue = 696.0; // uncomment this if you want to set this value in the sketch
#if defined(ESP8266) || defined(ESP32)
#endif
value from eeprom
LoadCell.begin();
long stabilizingtime = 2000; // tare preciscion can be improved by adding a few seconds of stabilizing time
boolean _tare = true; //set this to false if you don't want tare to be performed in the next step
LoadCell.start(stabilizingtime, _tare);
if (LoadCell.getTareTimeoutFlag()) {
Serial.println("Timeout, check MCU>HX711 wiring and pin designations");
}
else {
LoadCell.setCalFactor(calibrationValue); // set calibration factor (float)
Serial.println("Startup is complete");
}
while (!LoadCell.update());
Serial.print("Calibration value: ");
Serial.println(LoadCell.getCalFactor());
Serial.print("HX711 measured conversion time ms: ");
Serial.println(LoadCell.getConversionTime());
Serial.print("HX711 measured sampling rate HZ: ");
Serial.println(LoadCell.getSPS());
Serial.print("HX711 measured settlingtime ms: ");
Serial.println(LoadCell.getSettlingTime());
Serial.println("Note that the settling time may increase significantly if you use delay() in your sketch!");
if (LoadCell.getSPS() < 7) {
Serial.println("!!Sampling rate is lower than specification, check MCU>HX711 wiring and pin designations");
}
else if (LoadCell.getSPS() > 100) {
Serial.println("!!Sampling rate is higher than specification, check MCU>HX711 wiring and pin designations");
}
//Setup LCD
lcd.clear();
lcd.begin();
lcd.backlight();
//Setup Stepper
pinMode (PULPin, OUTPUT);
pinMode (DIRPin, OUTPUT);
//Setup Sensor PX dan IR
pinMode(px, INPUT);
pinMode(ir, INPUT);
}
void MSON()//Motor Stepper ON
{
digitalWrite(DIRPin, LOW);
unsigned long currentMicros = micros();
if (currentMicros - previousMicros >= interval)
{
previousMicros = currentMicros;
if (PULState == HIGH)
{
PULState = LOW;
}
else {
PULState = HIGH;
}
digitalWrite(PULPin, PULState);
}
// unsigned long curMil = millis();
// if (curMil - preMil >= 100)
// {preMil = curMil;
// }
}
void weighing()
{
lcd.print("weight : ");
lcd.setCursor(15, 2);
lcd.print("gram");
static boolean newDataReady = 0;
const int serialPrintInterval = 500; //increase value to slow down serial print activity
// check for new data/start next conversion:
if (LoadCell.update()) newDataReady = true;
// get smoothed value from the dataset:
if (newDataReady)
{
if (millis() > t + serialPrintInterval)
{
float i = LoadCell.getData();
Serial.print("Load_cell output val: ");
Serial.println(i);
float j = i / 10;
lcd.setCursor(8, 2);
lcd.print(j);
if (j >= 60 && j <= 71.0)
{
lcd.setCursor(0, 3);
lcd.print("Good");
}
if (j < 60 || j > 71.0)
{
lcd.setCursor(0, 3);
lcd.print("Bad");
}
newDataReady = 0;
t = millis();
}
}
// receive command from serial terminal, send 't' to initiate tare operation:
if (Serial.available() > 0)
{
float i;
char inByte = Serial.read();
if (inByte == 't') LoadCell.tareNoDelay();
}
// check if last tare operation is complete:
if (LoadCell.getTareStatus() == true)
{
Serial.println("Tare complete");
}
}
void loop()
{
if (B == 0)
{
lcd.setCursor(0, 0);
lcd.print("Tekan tombol untuk");
lcd.setCursor(1, 1);
lcd.print("A : START MOTOR");
lcd.setCursor(2, 2);
lcd.print("B : START Weighing");
}
char customKey = customKeypad.getKey();
switch (customKey)
if (B == 3)
{
lcd.setCursor(0, 0);
lcd.print("Press button for");
lcd.setCursor(1, 1);
lcd.print("A : START MOTOR");
lcd.setCursor(2, 2);
lcd.print("B : START Weighing");
}
if (B == 1)
{ MSON();
}
if (B == 2)
{
for (int x = 0; x < 201 ; x++)
{ weighing();
Serial.println("Progress Weighing");
}
for (int x = 200; x >= 1 ; x--)
{
Serial.println("Servo");
if (j >= 60 && j <= 71.0)
{
Serial.println("good");
servo.write(0);
}
else
{ Serial.println("bad");
servo.write(90);
}
lcd.clear();
B = 1;
}
}
}