I want to have more resolution, my project is a pan and tilt laser engraver. Due to its nature the work area will be small, and by so I want to have more control of the step of each motor, to have more resolution I think is the worl
Nema 17 stepper motors give 1.8 degrees per pulse, idk how much lower degrees per pulse I will need in order to be able to create good images.
DaRobot:
Nema 17 stepper motors give 1.8 degrees per pulse,
Most stepper motors are controlled by stepper drivers capable of producing several multiples of micro-steps. For example with 8x microstepping the movement per step will be about 0.225 degrees. I use the word "about" because the micro-step positioning is not quite as accurate as the full step positioning. Of course every 8th micostep will be at a full step position.
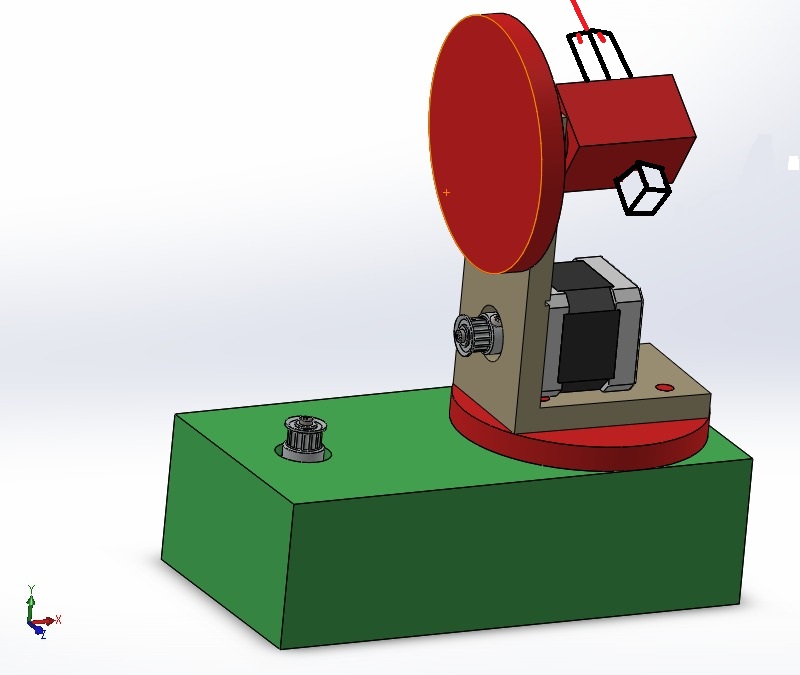
Your diagram suggests that there will be a substantial gear reduction between the motor pulley and the much larger red pulleys. What is that ratio? Maybe it will be sufficient not to need micro-stepping?
With this arrangement and a complete pulse I'll be able to control kindof like like a pulse per 4.5 degrees, not remember the exact number, but the motors have a driver that let me use a quarter of pulse, so now I will be able to move it at 0.12 degrees per quarter.
Thanks for answering
Now there the headache of the programming, I will post later on about it