Hi Folks!
Pessoal, estou precisando da ajuda de vocês.
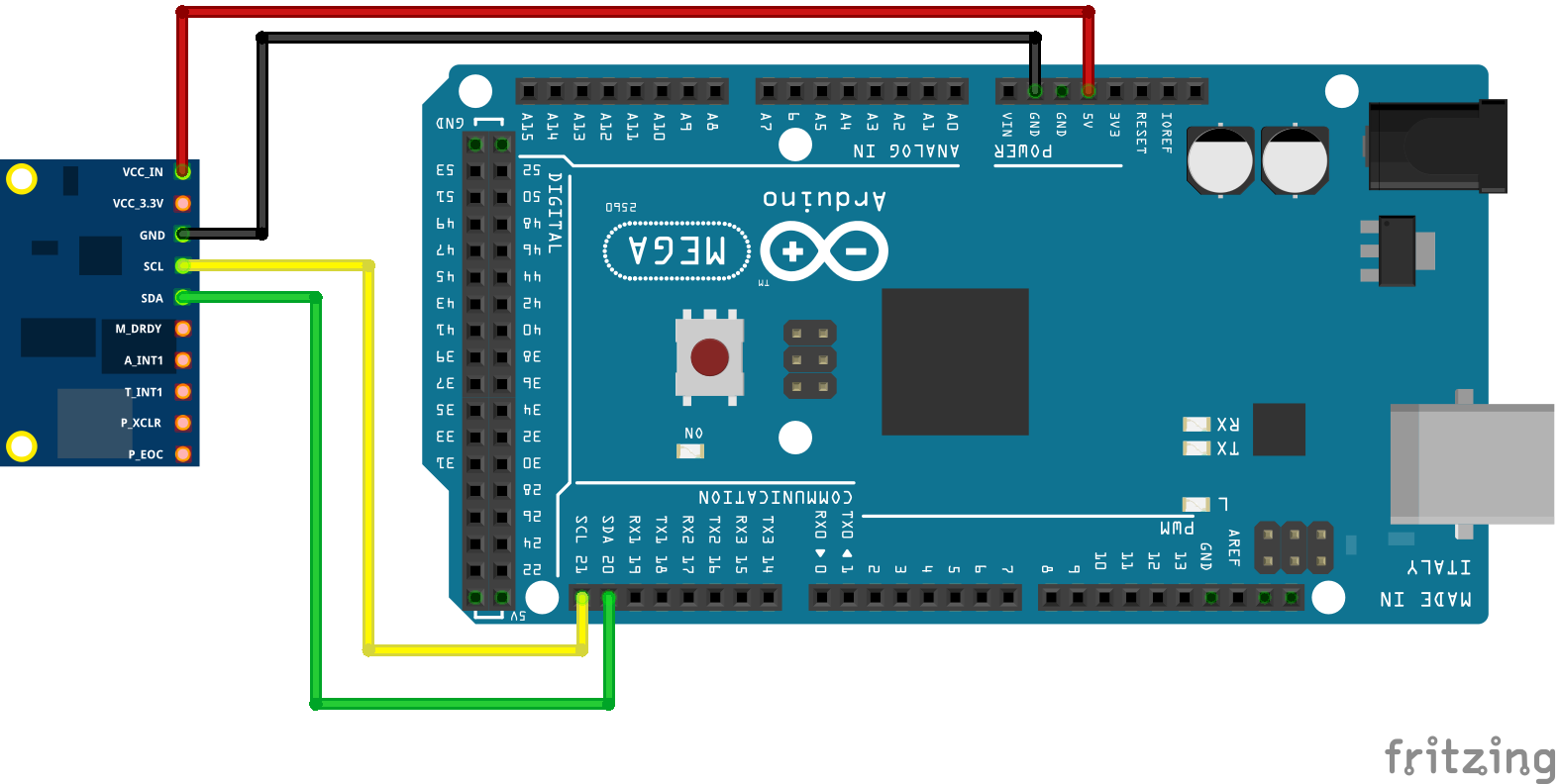
Estou trabalhando em um modulo GY-80 (Acelerometro, Giroscopio, Barômetro e Magnetómetro) comunicando via I2C.
O codigo compila sem erros, etretanto quando estou recuperando os dados dos eixos do acelerometro, o eixo Z esta retornando um valor de 2.00g constante.
Quando abro o serial monitor estes sao os valores retornados
ACC_X= -0.17 ACC_Y= 0.11 ACC_Z= 1.00
GYRO_X= 7 GYRO_Y= -11 GYRO_Z= 0
ACC_X= -0.25 ACC_Y= 0.16 ACC_Z= 1.50
GYRO_X= 6 GYRO_Y= -6 GYRO_Z= 3
ACC_X= -0.29 ACC_Y= 0.19 ACC_Z= 1.75
GYRO_X= 5 GYRO_Y= -7 GYRO_Z= 0
ACC_X= -0.32 ACC_Y= 0.20 ACC_Z= 1.87
GYRO_X= 8 GYRO_Y= -7 GYRO_Z= -2
ACC_X= -0.33 ACC_Y= 0.21 ACC_Z= 1.93
GYRO_X= 11 GYRO_Y= -6 GYRO_Z= 2
ACC_X= -0.33 ACC_Y= 0.21 ACC_Z= 1.96
GYRO_X= 8 GYRO_Y= -9 GYRO_Z= -1
ACC_X= -0.34 ACC_Y= 0.21 ACC_Z= 1.98
GYRO_X= 7 GYRO_Y= -9 GYRO_Z= 3
ACC_X= -0.34 ACC_Y= 0.22 ACC_Z= 1.99
GYRO_X= 10 GYRO_Y= -7 GYRO_Z= 6
ACC_X= -0.34 ACC_Y= 0.22 ACC_Z= 1.99
GYRO_X= 9 GYRO_Y= -5 GYRO_Z= 2
ACC_X= -0.34 ACC_Y= 0.22 ACC_Z= 1.99
GYRO_X= 8 GYRO_Y= -12 GYRO_Z= 1
ACC_X= -0.34 ACC_Y= 0.21 ACC_Z= 2.00
se noterm, o eixo começa com um valor de Z=1.00 e depois vai aumentando ate chegar a 2.00.
Estou um pouco perdido, ja procurei respostas mas sempre volto ao mesmo lugar.
Caso alguem puder ajudar ficarei grato.
[code]
/*************************************************************************************
* RICARDO SUTANA DE MELLO
* PROGRAMA PARA TESTE DO ADXL345 E L3G4200D ACOPLADO AO GY-80
* DATASHEET http://www.st.com/st-web-ui/static/active/en/resource/technical/document/datasheet/CD00265057.pdf
* http://www.st.com/st-web-ui/static/active/en/resource/technical/document/datasheet/CD00265057.pdf
*
* DATA: 08/10/2015
* CONTATO: ricardosutana@gmail.com
* **************************************************************************************
*/
#include <Wire.h>
// Definicao dos registradores ADXL345
#define Register_ID 0 //Device ID
#define Register_2D 0x2D //Power-saving features control
#define Register_X0 0x32 //X-Axis Data 0
#define Register_X1 0x33 //X-Axis Data 1
#define Register_Y0 0x34 //Y-Axis Data 0
#define Register_Y1 0x35 //Y-Axis Data 1
#define Register_Z0 0x36 //Z-Axis Data 0
#define Register_Z1 0x37 //Z-Axis Data 1
//Definicao dos registradores LGD4200D
#define CTRL_REG1 0x20
#define CTRL_REG2 0x21
#define CTRL_REG3 0x22
#define CTRL_REG4 0x23
#define CTRL_REG5 0x24
const float alpha = 0.5;
//Enderecamento I2C
int ADX_Address = 0x53; //Endereco I2C do sensor : 83 em decimal ou 0x53
int L3G4200D_Address = 105; //Endereco I2C do L3G4200D
//Variaveis Acelerometro
int reading = 0;
int val=0;
int Acc_X0, Acc_X1, Acc_X_out;
int Acc_Y0, Acc_Y1, Acc_Y_out;
int Acc_Z0, Acc_Z1, Acc_Z_out;
double Acc_Xg, Acc_Yg, Acc_Zg;
//variaveis para o filtro passa baixa
double LP_Xg=0;
double LP_Yg=0;
double LP_Zg=0;
//Variaveis Giroscopio
int Gyro_x;
int Gyro_y;
int Gyro_z;
void setup() {
Wire.begin();
Serial.begin(9600);
Serial.println("Inicializando ADX345");
Serial.println("Inicializando L3G4200D");
delay(100);
//Comunicacao Acelerometro
Wire.beginTransmission(ADX_Address);
Wire.write(Register_2D);
Wire.write(8); //medição ativada
Wire.endTransmission(); // fim transmissao
setupL3G4200D(2000); // Configura o L3G4200 para 200, 500 ou 2000 graus/seg
delay(1500);
}
void loop() {
//CALCULO DAS COORDENADAS
Acc_X_out = getAccData(Acc_X0, Acc_X1, ADX_Address, Register_X0, Register_X1);
Acc_Y_out = getAccData(Acc_Y0, Acc_Y1, ADX_Address, Register_Y0, Register_Y1);
Acc_Z_out = getAccData(Acc_Z0, Acc_Z1, ADX_Address, Register_Z0, Register_Z1);
Acc_Xg = Acc_X_out/256.0;
Acc_Yg = Acc_Y_out/256.0;
Acc_Zg = Acc_Z_out/256.0;
//FILTRO PASSA BAIXA
LP_Xg = Acc_Xg * alpha + (LP_Xg*(1.0 - alpha));
LP_Yg = Acc_Yg * alpha + (LP_Yg*(1.0 - alpha));
LP_Zg = Acc_Zg * alpha + (LP_Zg*(1.0 - alpha));
//LEITURA DO GIROSCOPIO
getGyroValues();
//IMPRIME COODENADAS DO ACELEROMETRO
Serial.print("ACC_X= ");
Serial.print(LP_Xg);
Serial.print(" ");
Serial.print("ACC_Y= ");
Serial.print(LP_Yg);
Serial.print(" ");
Serial.print("ACC_Z= ");
Serial.print(LP_Zg);
Serial.println(" ");
//
Serial.print("GYRO_X= ");
Serial.print(Gyro_x);
Serial.print(" ");
Serial.print("GYRO_Y= ");
Serial.print(Gyro_y);
Serial.print(" ");
Serial.print("GYRO_Z= ");
Serial.println(Gyro_z);
Serial.println(" ");
}
/*----------------------------------------------------------+
* +
* +
* D E C L A R A C A O D O S M E T O D O S +
* +
* +
* ---------------------------------------------------------+
*/
//*************************************************************************************
int getAccData(int Acc_D0, int Acc_D1, int ADX_Address, uint8_t Register_0, uint8_t Register_1 ){
int value;
Wire.beginTransmission(ADX_Address); // transmit to device
Wire.write(Register_0);
Wire.write(Register_1);
Wire.endTransmission();
Wire.requestFrom(ADX_Address,2);
if(Wire.available()<=2)
{
Acc_D0 = Wire.read();
Acc_D1 = Wire.read();
Acc_D1 = Acc_D1 << 8;
value = Acc_D0 + Acc_D1;
}
return value;
}
//*************************************************************************************
//*********************************************************
void getGyroValues()
{
byte xMSB = readRegister(L3G4200D_Address, 0x29);
byte xLSB = readRegister(L3G4200D_Address, 0x28);
Gyro_x = ((xMSB << 8) | xLSB);
byte yMSB = readRegister(L3G4200D_Address, 0x2B);
byte yLSB = readRegister(L3G4200D_Address, 0x2A);
Gyro_y = ((yMSB << 8) | yLSB);
byte zMSB = readRegister(L3G4200D_Address, 0x2D);
byte zLSB = readRegister(L3G4200D_Address, 0x2C);
Gyro_z = ((zMSB << 8) | zLSB);
}
//*********************************************************
//*********************************************************
int setupL3G4200D(int scale)
{
//From Jim Lindblom of Sparkfun's code
// Enable x, y, z and turn off power down:
writeRegister(L3G4200D_Address, CTRL_REG1, 0b00001111);
// If you'd like to adjust/use the HPF, you can edit the line below to configure CTRL_REG2:
writeRegister(L3G4200D_Address, CTRL_REG2, 0b00000000);
// Configure CTRL_REG3 to generate data ready interrupt on INT2
// No interrupts used on INT1, if you'd like to configure INT1
// or INT2 otherwise, consult the datasheet:
writeRegister(L3G4200D_Address, CTRL_REG3, 0b00001000);
// CTRL_REG4 controls the full-scale range, among other things:
if(scale == 250){
writeRegister(L3G4200D_Address, CTRL_REG4, 0b00000000);
}else if(scale == 500){
writeRegister(L3G4200D_Address, CTRL_REG4, 0b00010000);
}else{
writeRegister(L3G4200D_Address, CTRL_REG4, 0b00110000);
}
// CTRL_REG5 controls high-pass filtering of outputs, use it
// if you'd like:
writeRegister(L3G4200D_Address, CTRL_REG5, 0b00000000);
}
//*********************************************************
//*********************************************************
void writeRegister(int deviceAddress, byte address, byte val)
{
Wire.beginTransmission(deviceAddress); // start transmission to device
Wire.write(address); // send register address
Wire.write(val); // send value to write
Wire.endTransmission(); // end transmission
}
//*********************************************************
//*********************************************************
int readRegister(int deviceAddress, byte address)
{
int v;
Wire.beginTransmission(deviceAddress);
Wire.write(address); // register to read
Wire.endTransmission();
Wire.requestFrom(deviceAddress, 1); // read a byte
while(!Wire.available())
{
// waiting
}
v = Wire.read();
return v;
}
//*********************************************************
[/code]
Att