Hi all
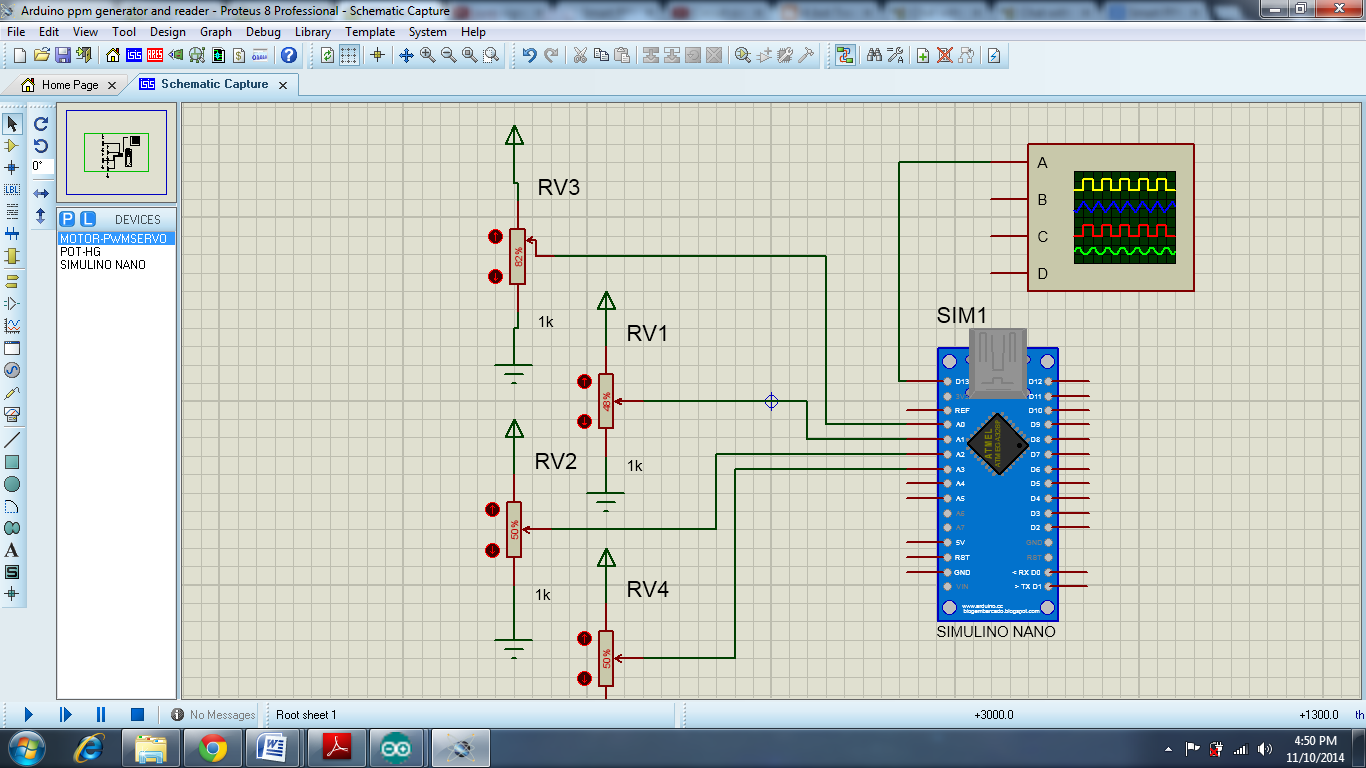
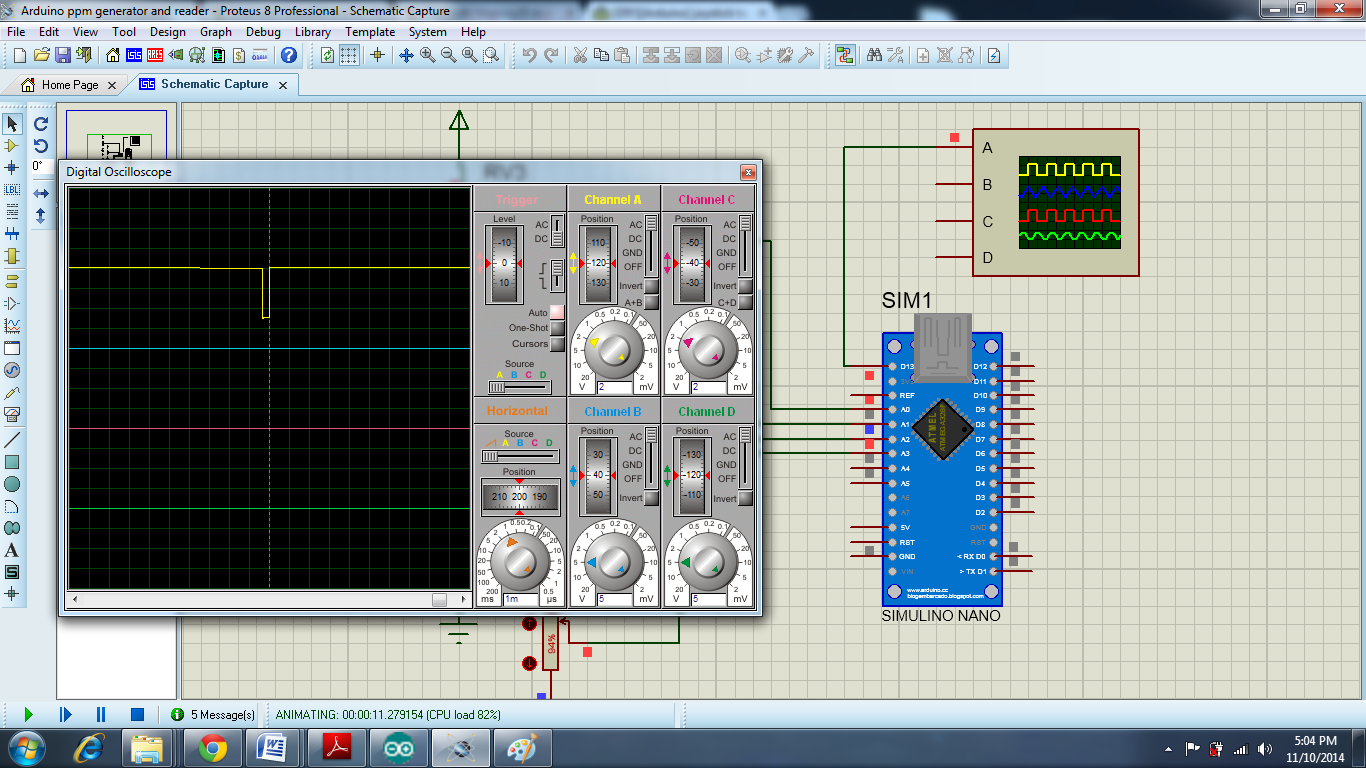
I tried to simulate in Proteus code below but it does not work, can someone help me?

#define NB_WAY 6 // number of ways
#define LOW_LENGTH 300 // How long last (in µs) a low between 2 pulses
#define MIN_PPM_PULSE 1300 // minimum pulse length in µs
#define PPM_PULSE_LENGTH 700 // how much more µs will last the max pulse length
#define PACKET_LENGTH 21000 // How long (µs) last a full trame
// trame length is fixed ! Every trame will make PACKET_LENGTH µs !
// MUST NO BE MORE THAN 32ms !!! (timer's prescaler constraint)
#define PPM_OUTPUT 13 // OUTPUT PIN
int way_value[NB_WAY];
int way_pin[NB_WAY];
int way_min[NB_WAY];
int way_max[NB_WAY];
int i = 0;
int p = 0; // temp var for duty cycle calculation
int last_i_timer = 0; // last way's value sent through PPM signal
unsigned long int trame_elapsed_time = 0;
bool output_state = LOW;
void setup() {
// ppm output :
pinMode(PPM_OUTPUT, OUTPUT);
digitalWrite(PPM_OUTPUT, output_state);
// inits arrays
for(i=0;i<NB_WAY;i++)
{
way_pin[i] = 14 + i;
pinMode(way_pin[i], INPUT);
way_value[i] = analogRead(way_pin[i]);
way_min[i] = way_value[i];
way_max[i] = way_value[i];
}
// init timer
cli(); // desactivation interruptions
TCCR1A = 0x00; // set timer1 registers to 0
TCCR1B = 0x00;
TIMSK1 = 0x00;
OCR1A = 65535;// set to the max
// CTC mode:
TCCR1B |= (1 << WGM12);
// prescaler to 8, that allow (@16mhz) 32.8ms trame
TCCR1B |= (0 << CS10);
TCCR1B |= (1 << CS11);
TCCR1B |= (0 << CS12);
// timer activation
TIMSK1 |= (1 << OCIE1A);
sei();
}
ISR(TIMER1_COMPA_vect)
{
TIMSK1 &= (0 << OCIE1A);
if(output_state)
{ // END OF A HIGH, we have to wait LOW_LENGTH ms before next pulse
output_state = LOW;
digitalWrite(PPM_OUTPUT, output_state);
OCR1A = 2 * LOW_LENGTH; // set when next timer interruption will occur
TIMSK1 |= (1 << OCIE1A); // restart timer
trame_elapsed_time += LOW_LENGTH;
}
else
{ // END of a LOW_LENGTH, new pulse !
output_state = HIGH;
digitalWrite(PPM_OUTPUT, output_state);
if(last_i_timer >= NB_WAY) // last way, so wait until next packet
{
OCR1A = (2 * PACKET_LENGTH) - (trame_elapsed_time * 2);// set when next timer interruption will occur
TIMSK1 |= (1 << OCIE1A); // restart timer
last_i_timer = 0;
trame_elapsed_time = 0;
}
else
{
OCR1A = 2 * way_value[last_i_timer];// set when next timer interruption will occur
TIMSK1 |= (1 << OCIE1A); // restart timer
last_i_timer ++;
trame_elapsed_time += way_value[NB_WAY];
}
}
}
void loop() {
for(i=0;i<NB_WAY;i++)
{
// Read current value of way i :
p = analogRead(way_pin[i]);
// auto calibration...
if(p > way_max[i]) way_max[i] = p;
if(p < way_min[i]) way_min[i] = p;
// Arduino map function sucks
way_value[i] = MIN_PPM_PULSE + PPM_PULSE_LENGTH * (float)((float)(p - way_min[i]) / (float)(way_max[i] - way_min[i]));
}
}
Moderator edit: CODE TAGS