Das Ardublock baut aus deinem zusammengeschobenen genau solchen Code.
Nur viel umständlicher.
Das mit den US-Sensoren funktioniert genauso.
Du kannst, bei richtiger Programmierung, ganz viele Dinge machen, ohne das die sich gegeneinander beeinflussen.
Arduino basiert auf C++. Alles was c++ für den AVR kann, kann also Arduino auch. Die Macher haben sich für viele Dinge nur "Abkürzungen" ausgedacht und damit den einfachen Einstieg ermöglicht.
Das ardublock baut genau darauf auf. Um nicht zu sagen noch ne Abkürzung auf der Abkürzung zum Code 
So. Nu kannst überlegen, ob Du mit dem Ardublock weiter Experimentieren willst, oder doch lieber die paar Zeilen Code selbst schreibst. (Mit entsprechendem Lerneffekt einer Programmiersprache)
Ich hab mal was schnelles gebaut.
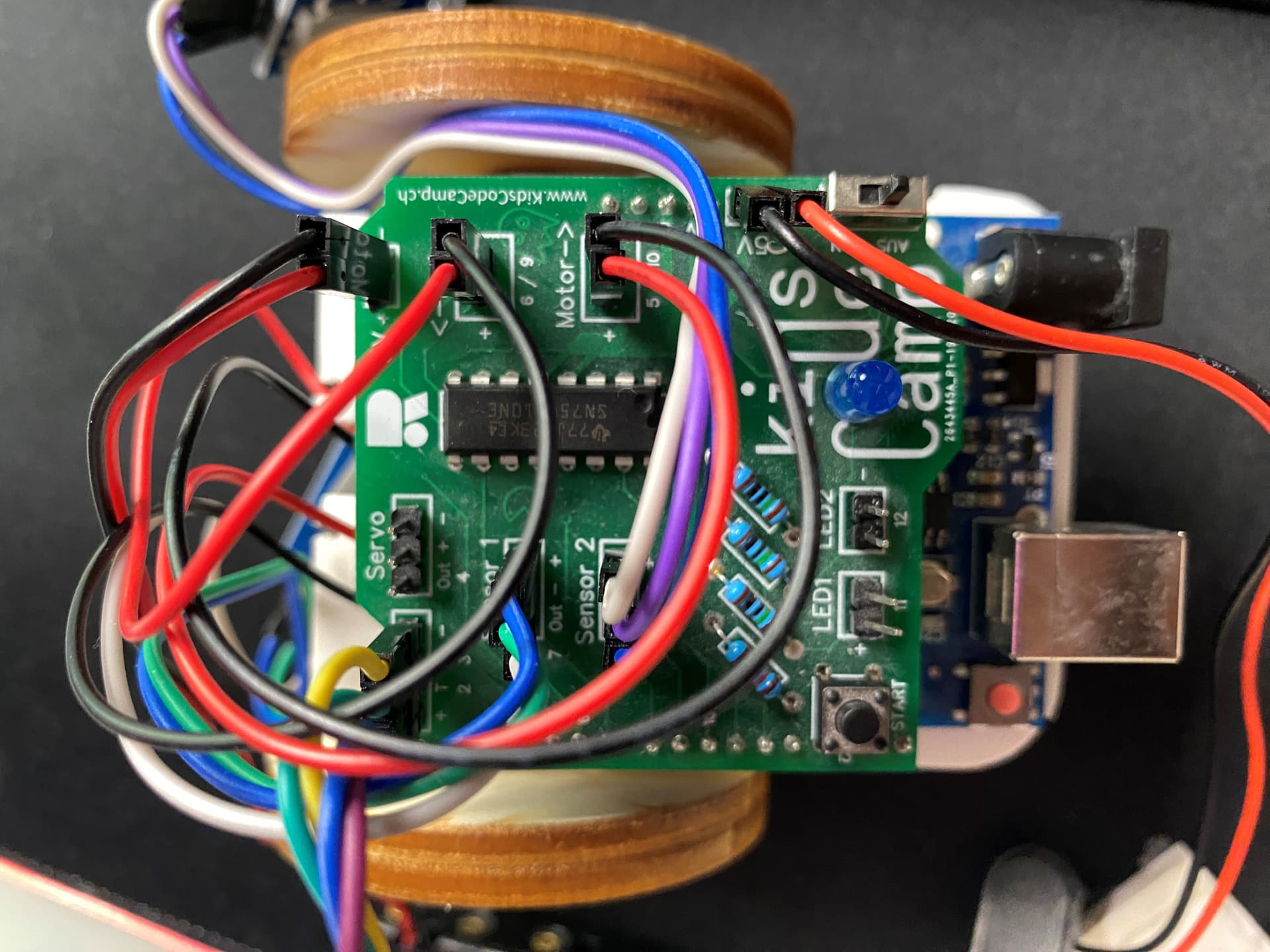
Auf dem Bild von Dir ist ein Sensor mit einem lila und weissen Kabel.
Ein PIN ist vermutlich die 7. Der könnte der EchoPin sein. Der andere muss ermittelt werden.
Wenn Du da nichts drauf zu stehen hast, was das für eine Nummer ist, dann musst Du versuchen das anhand der Leiterbahnen rauszubekommen. (*)
Dann die beiden PinNummern im Code eintragen und aufspielen.
Es sollte funktionieren...
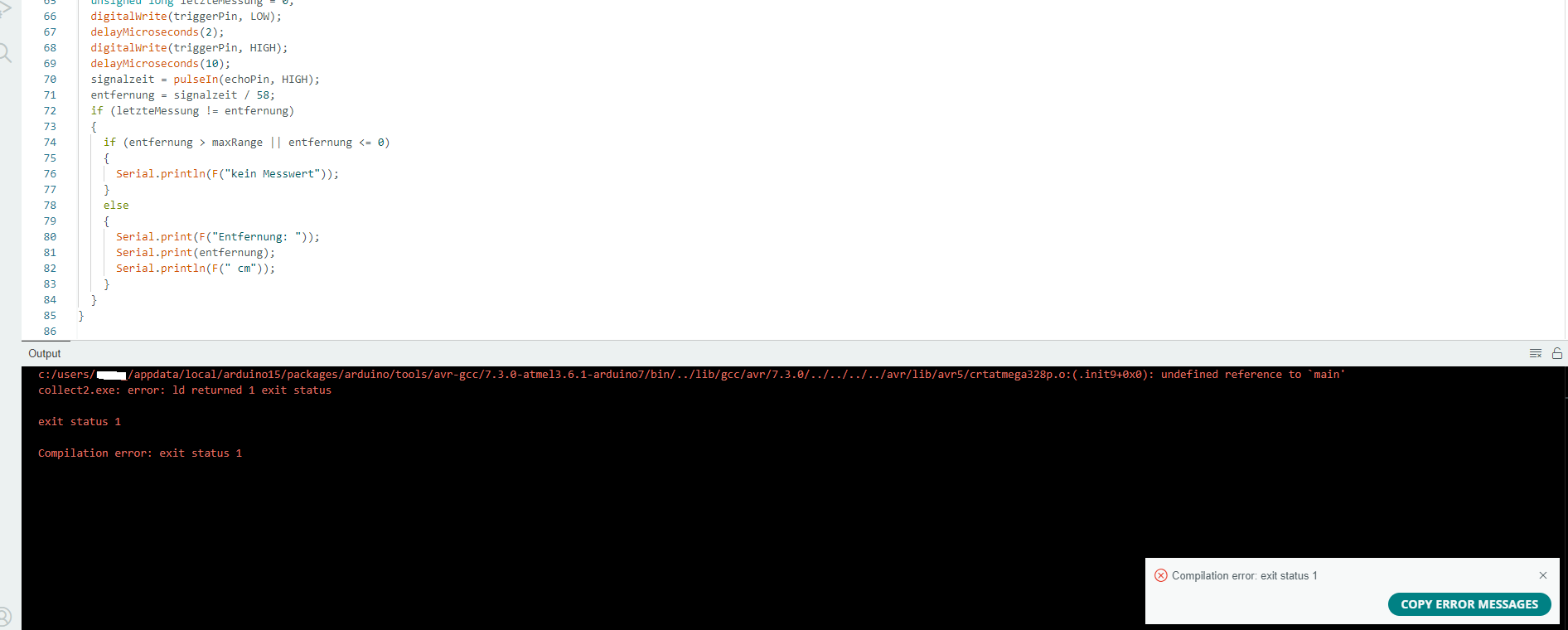
Benutze den seriellen Monitor, damit Du ein paar Ausgaben siehst.
const byte motL[2] = {5, 10};
const byte motR[2] = {6, 9};
const byte triggerPin = 12; // - Die Pinnummer muss ermittelt werden
const byte echoPin = 7; // - Hier auch!
const unsigned int maxRange = 300;
unsigned long signalzeit;
unsigned int entfernung;
void setup()
{
Serial.begin(9600);
Serial.println(F("\r\nStart...\r\n"));
pinMode(triggerPin, OUTPUT);
pinMode(echoPin, INPUT);
for (byte b = 0; b < 2; b++)
{
pinMode(motL[b], OUTPUT);
pinMode(motR[b], OUTPUT);
digitalWrite(motL[b], LOW);
digitalWrite(motR[b], LOW);
}
}
void loop()
{
messung();
if (entfernung < 20) // Objekt in der Nähe
{
rueckwaerts(); // Objekt weiter weg
}
else if (entfernung < 100)
{
vorwaerts();
}
else // Ich weiss nicht, wo ich bin
{
halt();
}
}
void vorwaerts()
{
digitalWrite(motL[1], LOW);
digitalWrite(motR[1], LOW);
digitalWrite(motL[0], LOW);
digitalWrite(motR[0], LOW);
}
void rueckwaerts()
{
digitalWrite(motL[0], LOW);
digitalWrite(motR[0], LOW);
digitalWrite(motL[1], LOW);
digitalWrite(motR[1], LOW);
}
void halt()
{
for (byte b = 0; b < 2; b++)
{
digitalWrite(motL[b], LOW);
digitalWrite(motR[b], LOW);
}
}
void messung()
{
unsigned long letzteMessung = 0;
digitalWrite(triggerPin, LOW);
delayMicroseconds(2);
digitalWrite(triggerPin, HIGH);
delayMicroseconds(10);
signalzeit = pulseIn(echoPin, HIGH);
entfernung = signalzeit / 58;
if (letzteMessung != entfernung)
{
if (entfernung > maxRange || entfernung <= 0)
{
Serial.println(F("kein Messwert"));
}
else
{
Serial.print(F("Entfernung: "));
Serial.print(entfernung);
Serial.println(F(" cm"));
}
}
}
Und wenn Du ein paar grundlegende Dinge lernen willst, empfehele ich mal nen pdf - das liest sich gut weg und ist besser als jedes Einsteigerbuch, da es sich auf das wesentliche konzentriert.
Hier zum download und jeden Abend unters Kopfkissen packen. Nicht auswendig lernen. Nur wissen was drin steht - der rest kommt von allein.
(*) Solltest Du die Pinnummern nicht rausbekommen, müsste ich Dir einen Code schreiben, der alle Pins abfragt - ist nicht so problematisch, dauert nur nen Moment.