Hi I'm trying to make a simple robotic arm but my construction of the frame is poor. My problem is that the robotic arm always leans over and collapses due to there being a incomplete frame(I intend on improving the frame). I need to find a way to allow the joints of the arm to be completed(I only have half of the arm complete.
Any help would be helpful
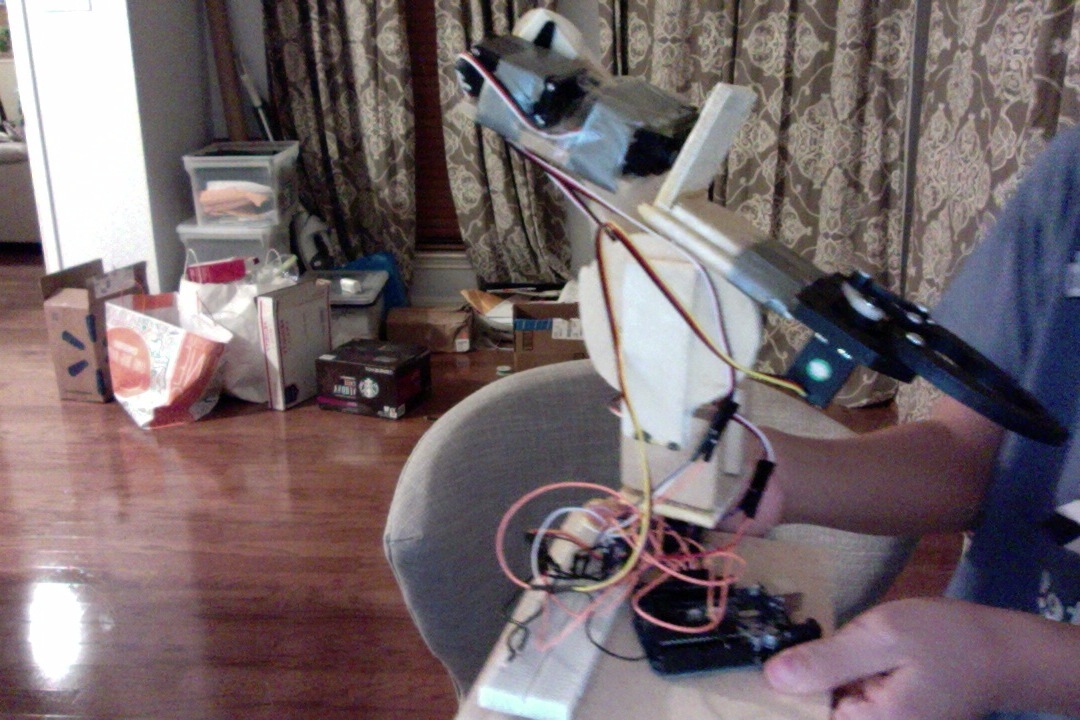
PS if you don't understand me look at this picture and you'll understand.
Sorry about that I'm trying to take the picture on a mac so its hard. The point is i need to fill a gap between the base and the servo on the top. I need to have a way to smoothly be able to link the 2 points effectively so they can the rotated.
Take that sort of photo with a proper camera and do it against a plain background - probably not white. Make a background with a plain coloured towel or sheet for example. Or just put the thing on a plain coloured chair.
Maybe some weight on the other end of the arm to balance the weight of the servos would help.
Many robots put all the servos on the base and use levers to extend the motion to the extremities.
I'm sorry about that ill try to do that now. I need help on the shoulder to elbow part. if you can see, the shoulder to the elbow piece is missing. i have to cut out a piece of wood but it needs a bearing thingy to rotate so it will be able to move the shoulder to elbow part. However i cannot find any piece that is like a bearing with a rod in the middle . Also i cant put a rod through the joint because the servo is there.
SlimyCheese:
I need help on the shoulder to elbow part. if you can see, the shoulder to the elbow piece is missing.
Post another copy of the photo with an arrow drawn on it to show the parts you are referring to. I don't understand from your description which joint needs to be reinforced or supported
Better still just make a simple line-drawing of the machine rather than a photograph.
I'm guessing you are talking about the joint on the upper right side. A ball bearing is overkill for that construction, just use two pieces of wood and a screw+nut as a pivot.
couka:
I'm guessing you are talking about the joint on the upper right side. A ball bearing is overkill for that construction, just use two pieces of wood and a screw+nut as a pivot.
Robin2:
Post another copy of the photo with an arrow drawn on it to show the parts you are referring to. I don't understand from your description which joint needs to be reinforced or supported
Better still just make a simple line-drawing of the machine rather than a photograph.
SlimyCheese:
If i am overloading the servos how do i fix this
From your picture, you are using one of the servos as a vertical pivot; from the image in reply #10, the servo away from your hands. Correct?
Extend the arm past the servo enough that this extention will counter balance the gripper, gripper servo, rotation servo.
You will have to add enough weight to counterbalance your gripper and gripper servo, and the pivot arm, pivot servo.
Realize that any weight you pick up in the gripper will cause a torque on the vertical pivot servo.
A standard S148 servo is rated at 33 oz/in of torque. You have an aproximate(~) 10in moment arm( distance from servo pivot to your fingers. If my guesses are close, that means the maximum object you could pickup is 3.3 oz ((33oz/in) / 10 in).
To increase the lifting forces:
Balance the arm, so that the servo doesn't have to lift the weight of the arm
Shorten the length of the arm so that the moment arm is shorter.
If the arm was only 5 inches your payload would increase to 6.6oz
shorten the distance from the rotation servo to the gripper assembly.
That White plastic part.