Hey! New to Arduino and the Forums so hear me out and ask for any more information you require...
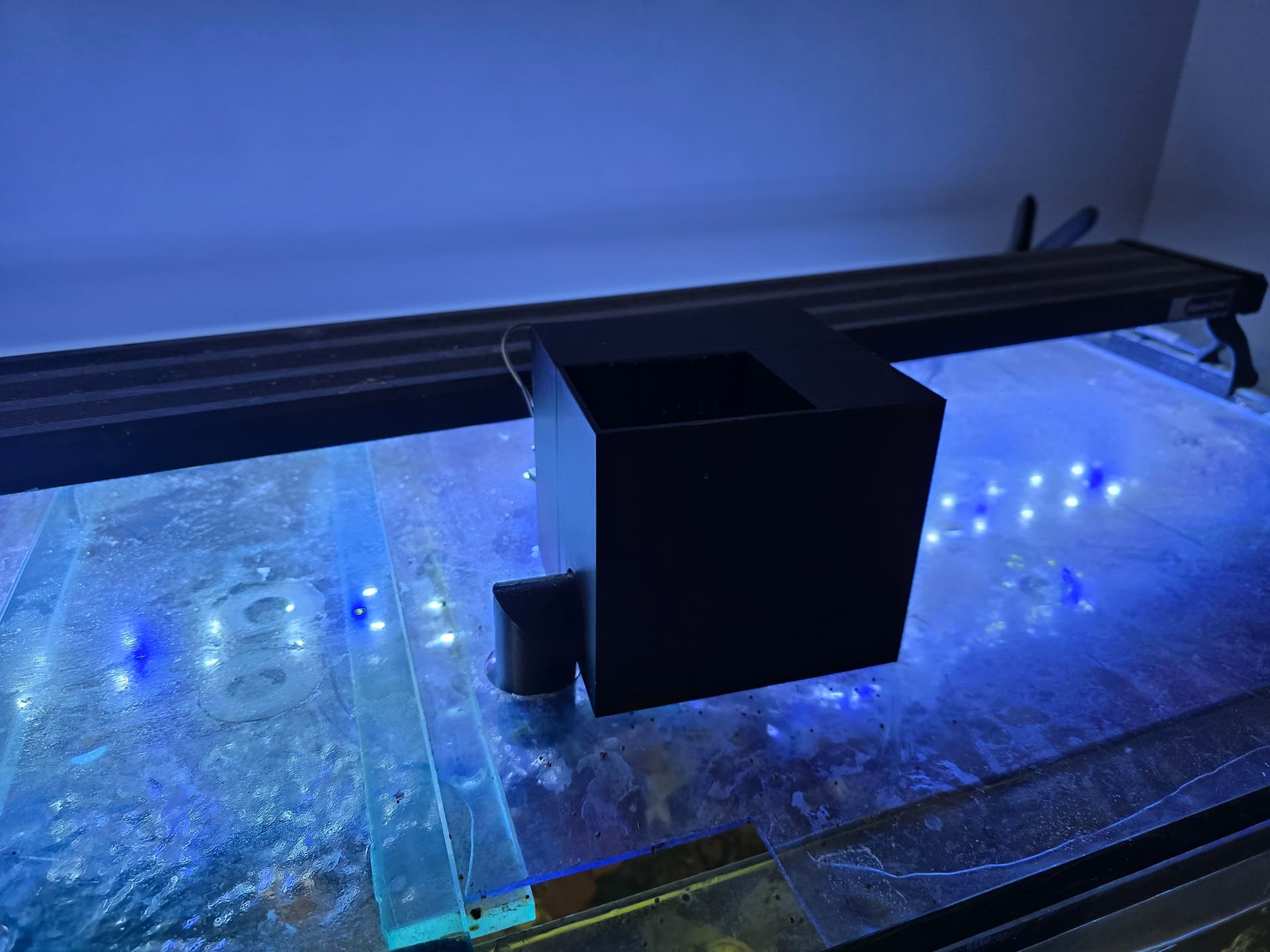
I have made an automatic fish feeder for my partners marine/reef tank however there's been some speculation floating around the house that it hasn't been working ![]() .
.
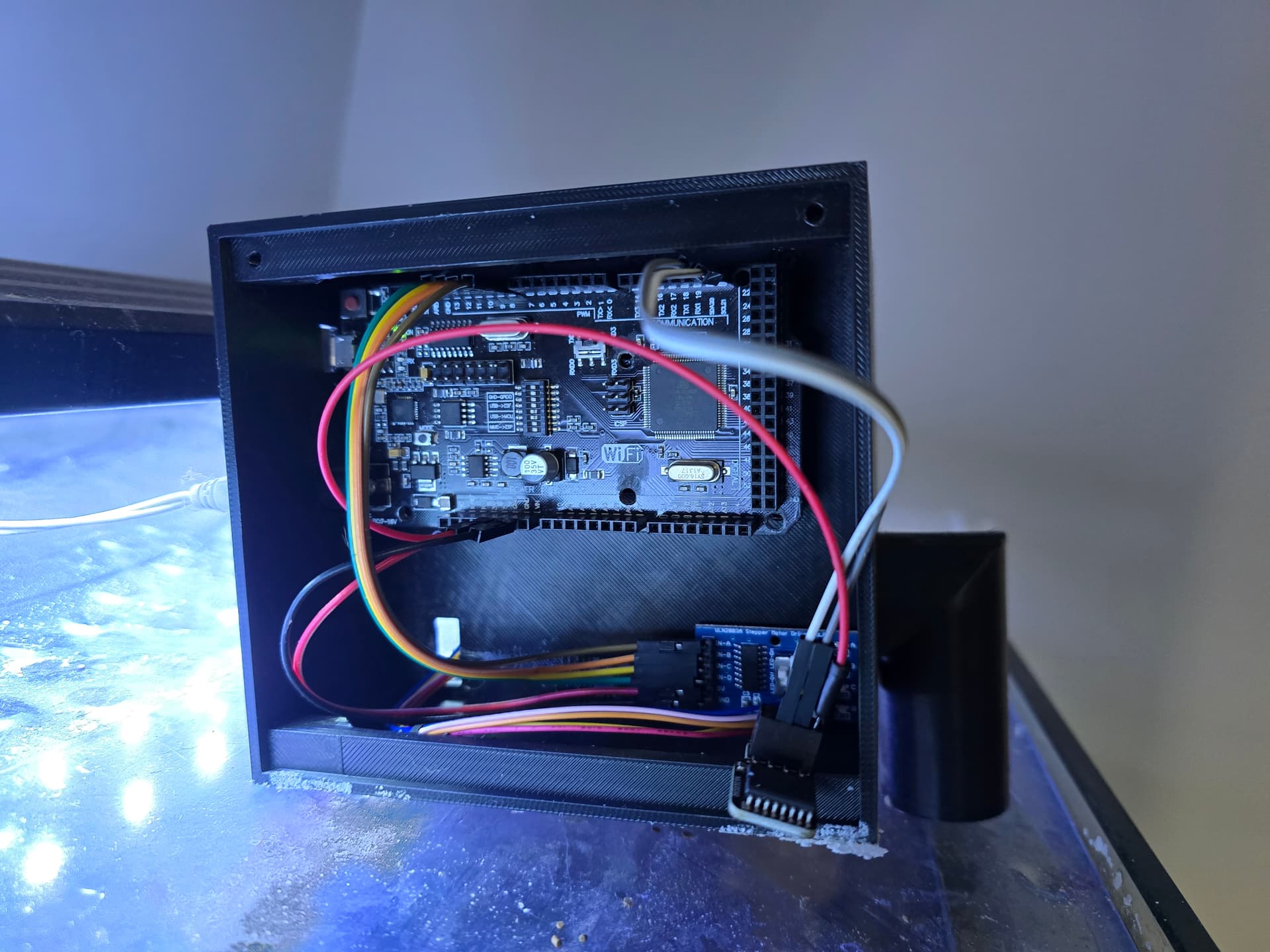
Currently it's running from Arduino mega, ChronoPi 1.0 RTC, 28BYJ-48 Stepper motor and driver.
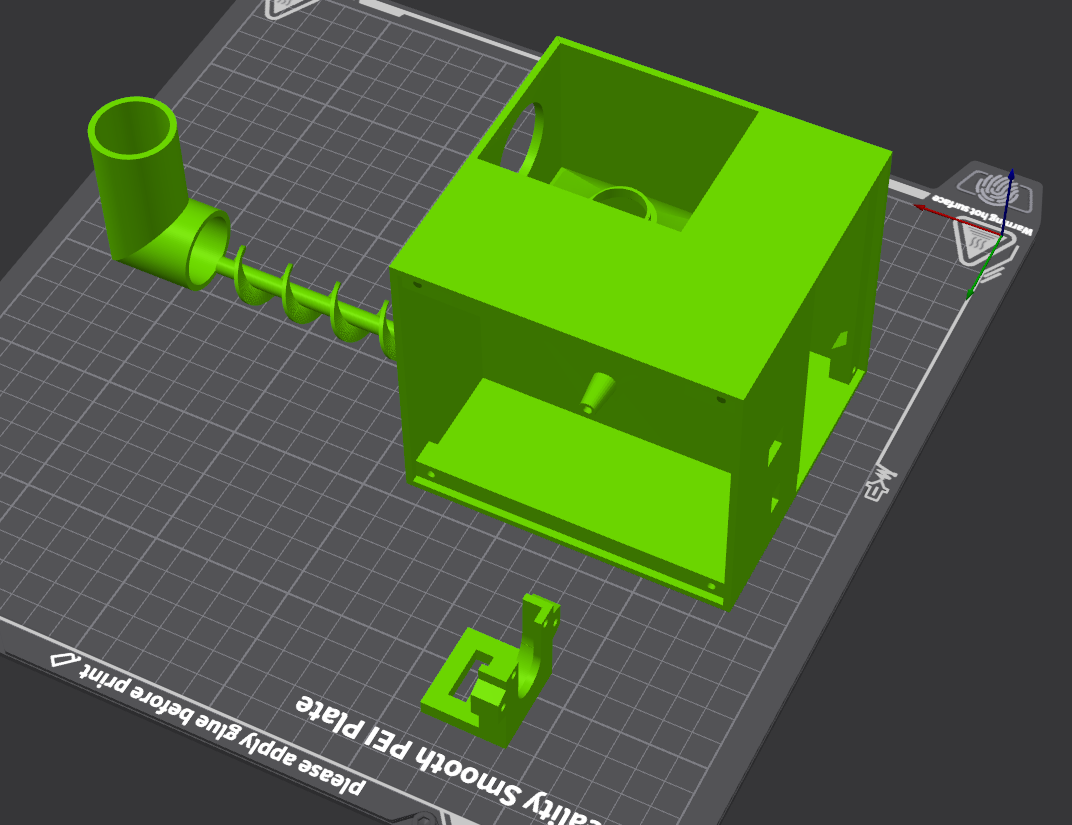
At 7AM every morning the stepper powers an auger, which augers fish food from the hopper into the tank. I wanted to install a break sensor or distance sensor to the piped elbow into the tank to display a timestamp and duration of the break/distance change on a e-paper screen. However, when the motor is spinning everything else stops/is blocked. How do I go about this?
#include <Arduino.h>
#include <DS3231.h>
#include <Stepper.h>
//Definitions
const int feedAmount = 2000;
const String feedTime = "07:00";
String lastFedDate = "";
String lastFedTime = "";
Stepper augerMotor = Stepper(feedAmount, 8, 10, 9, 11);
DS3231 rtc(SDA, SCL);
void setup();
void loop();
void stopMotor();
void setup()
{
// Setup Serial connection
Serial.begin(9600);
rtc.begin();
// Uncommented to set the date and time
//rtc.setDOW(MONDAY); // Set Day-of-Week to SUNDAY
//rtc.setTime(13, 22, 0); // Set the time to 12:00:00 (24hr format)
//rtc.setDate(24, 2, 2025); // Set the date to January 1st, 2014
}
void loop()
{
String currentTime = rtc.getTimeStr(FORMAT_SHORT);
if (currentTime == feedTime) {
if (lastFedDate != rtc.getDateStr(FORMAT_SHORT, FORMAT_LITTLEENDIAN, '/')) {
augerMotor.setSpeed(10);
augerMotor.step(feedAmount);
lastFedDate = rtc.getDateStr(FORMAT_SHORT, FORMAT_LITTLEENDIAN, '/');
lastFedTime = rtc.getTimeStr(FORMAT_SHORT);
Serial.println("Feeding fish...");
stopMotor();
} else {
Serial.println("Fish have already been fed.");
}
}
// Send time
Serial.println(rtc.getDateStr(FORMAT_SHORT, FORMAT_LITTLEENDIAN, '/'));
Serial.println(rtc.getTimeStr());
Serial.println("---------------");
// Wait one second before repeating
delay (1000);
}
void stopMotor(){
digitalWrite(8,LOW);
digitalWrite(9,LOW);
digitalWrite(10,LOW);
digitalWrite(11,LOW);
}


Cheers!