I am calibrating my accelerometer sensor by following a tutorial by a person named Merlin from sailboatintruments1. And so far it's doing a great job at showing me how far I am off from a calibrated sensor.
I have a couple of questions:
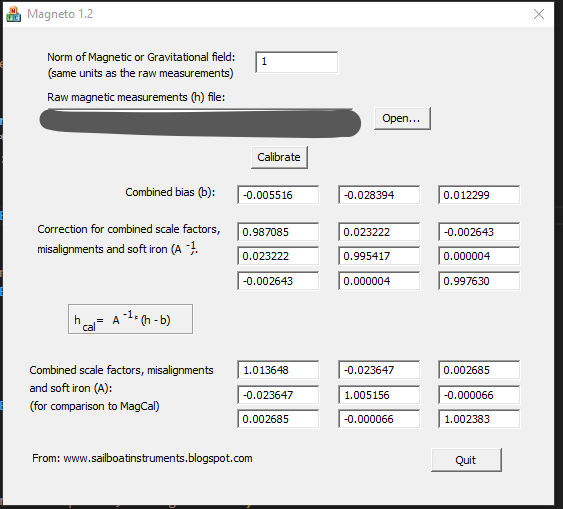
The software doesn't provide what is the x, y, or z axis and I am assuming its respectively x, y, and z from left to right?
I see the formula to use to calibrate my raw values but I don't know how to implement if I have a scale factor in the form of a matrix, or at least it looks like a scale factor matrix.
Is it the "Correction for combined scale factors, ..." or is it the "Combined scale factors, ..." matrix that I use for calibrating? I assume the "Correction for Combined scale factors, ..." because it is represented as the variable A^-1 .
I am now about to start trying this calibration out my PCB that I designed the accelerometer onto but after loading my main program onto my board I am reading -0.00 for all axis values.
I probed my SPI lines on my PCB and as expected CS, SCK, and MOSI are all working but the MISO line has no signal.
There is a portion of the program that begins the SPI and it actually says that it could not connect to the IMU sensor.
I do have other sensors such as a Display and Bluetooth that are on the same SPI bus. I plan to use different chip select pins though and the program I am running doesn't initialize or talk to those sensors, only to the accelerometer.
Below are snippets of my schematic and the code I was using to test the accelerometer on my PCB.
So digging a bit more into this I see in the code where it fails. It fails to get the part ID of the IMU sensor.
/* IMU SENSOR */
if (myIMU.beginSPI(24, 10000000, SPI))
Serial.println("Ready.");
else
{
Serial.println("Could not connect to IMU.");
Serial.println("Freezing");
}
When I dig deeper into the Arduino Library of the LSM6DS0 sensor, it is not reading the correct Part ID. I am supposed to get 0x6C but instead I was getting 0xFF.
I decided to take off the Bluetooth module that snapped into my PCB and check the SPI signal wires with an oscilloscope again. Now CS, MOSI, MISO, and SCK all have signals.
Although my remaining issue is till present, I am still not getting any readings from the IMU sensor and the Part ID is still wrong. Now I get a PART ID of 0.