I have found a click board that can replace the mcp2003b chip, the ATA663254 click board. And now i connected this one with my valve.
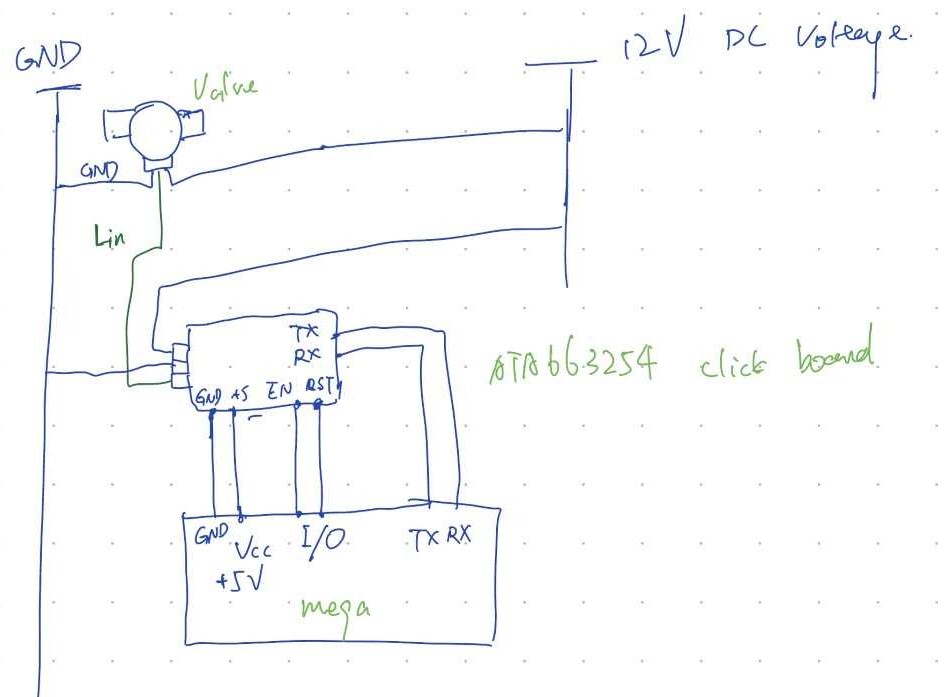
This is the datasheet of the ATA663254
and the schematic of it. So this time i'm preetty positive that i made it right.
Then this is the libraries that required to use the click board.
And this is my code right now.
#include "mikrosdk_v2-master.h"
#include "ata663254.h"
#include "Arduino.h"
#include "lin.h"
#include <HardwareSerial.h>
Lin lin(Serial2, 17); // create LIN interface using UART2, RXD = Pin 16, TXD = Pin 17
// ------------------------------------------------------------------ VARIABLES
#define DEMO_APP_RECEIVER
// #define DEMO_APP_TRANSMITTER
static ata663254_t ata663254;
static log_t logger;
static char rec_buf[ 50 ] = { 0 };
uint8_t NAD = 0x3C;
uint8_t buf[8]= {0};
uint8_t bitmask1 = 0b01000001;
uint8_t bitmask2 = 0b00010001;
uint8_t bitmask3 = 0b10010100;
uint8_t nBytes = 8;
uint8_t proto = 2;
uint8_t subsystem_id = 0x47; // subsystem ID = 0x747 >> 5 = 0x47
uint8_t data1 = 65;
uint8_t Position1 = 5;
uint8_t Position2 = 220;
uint8_t Failsafe = 0;
uint8_t padding_byte = 0xFF;
// Build the message
buf[0] = NAD;
buf[1] = 0xFF;
buf[2] = data1;
buf[3] = position1;
buf[4] = position2;
buf[5] = 0xFF;
buf[6] = 0xFF;
buf[7] = 0x00;
// ------------------------------------------------------ APPLICATION FUNCTIONS
void application_init ( void )
{
log_cfg_t log_cfg;
ata663254_cfg_t cfg;
/**
* Logger initialization.
* Default baud rate: 115200
* Default log level: LOG_LEVEL_DEBUG
* @note If USB_UART_RX and USB_UART_TX
* are defined as HAL_PIN_NC, you will
* need to define them manually for log to work.
* See @b LOG_MAP_USB_UART macro definition for detailed explanation.
*/
LOG_MAP_USB_UART( log_cfg );
log_init( &logger, &log_cfg );
log_info( &logger, "---- Application Init ----" );
// Click initialization.
ata663254_cfg_setup( &cfg );
ATA663254_MAP_MIKROBUS( cfg, MIKROBUS_1 );
ata663254_init( &ata663254, &cfg );
ata663254_enable( &ata663254, 1 );
Delay_ms( 1000 );
}
void application_task ( void )
{
#ifdef DEMO_APP_RECEIVER
// RECEIVER - UART polling
int32_t len = ata663254_generic_read( &ata663254, rec_buf, 50 );
if ( len > 0 )
{
log_printf( &logger, "Received data: " );
for ( int32_t cnt = 0; cnt < len; cnt++ )
{
log_printf( &logger, "%c", rec_buf[ cnt ] );
}
memset( rec_buf, 0 , 50 );
}
Delay_ms( 100 );
#endif
#ifdef DEMO_APP_TRANSMITTER
// TRANSMITER - TX each 2 sec
ata663254_generic_write( &ata663254, buf, 8 );
log_info( &logger, "--- Data sent ---" );
Delay_ms( 2000 );
#endif
}
void setup() {
// put your setup code here, to run once:
Serial.begin(19200); // initialize serial communication with PC for debug
pinMode(32, OUTPUT); // set pin 32 as output for power control of valve
digitalWrite(32, HIGH); // set pin 32 high to power on valve
lin.begin(19200);
}
void loop() {
// put your main code here, to run repeatedly:
lin.send(0x31, buf, sizeof(buf), 2); // send LIN message to valve with address 0x31, using NAD 0x3C and subsystem ID 0x747
delay(500);
application_init( );
application_task( );
}
Now the problem is: 1. if i use this new library to send the message, should i add the code manually to send first the sync break byte and message ID byte then the buf? Or i can still use the lin library to send my message?
2. It's always 'No such file ' about the the library mikrosdk_v2. I have post another topic about this and have so far no answer. this is the link.
I would really appreciate your help!