Ciao Cippe, spero davvero di esserti stato utile e fammi sapere come e' andata a finire.
Comunque ricorda: cacciare moneta (=riduttori) vedere cammello...
Astrobeed... mah!
Ora non ho proprio tempo. E comunque... qualcosa devo pur dirti:
"quattro quadranti" non e' una formula magica come "abracadabra". E' un modello matematico di una realta' fisica.
E, nel caso di un motore cc a spazzole, si riferisce a velocita' e corrente su ascissa e ordinata e 1/periodo e coppia.
Detto questo, prima di permetterti di dire a me di esprimermi correttamente...
accelerazione + e coppia +
- L' accelerazione non c'entra un picchio coi 4 quadranti (la velocita' e' un' altra cosa).
il diodo implicito nei mospower
- Si chiama diodo "intrinseco".
il tempo necessario a passare da interdizione a conduzione
- Ma cosa dici? Stiamo parlando di frenare un motore CC! Si parla di secondi! E comunque Il diodo di ricircolo, il diodo damper, il diodo intrinseco o come lo chiami, fanno tutti la stessa cosa: portano il motore nel II (o IV) quadrante quando gli togli corrente. O no?
E quindi, frena.
aggiungiamo pure il fatto che con quello schema non puoi usare il relè ...
- Me lo dimostri, per cortesia? Sei capace di buttare giu' un qualche schema e/o due righe?
Va bene, torniamo al discorso serio.
Prova a pensare cosa succede se un rele' inverte il N-S di un motore CC e poi guarda il I e il III quadrante (se andiamo) o il II e il IV (se freniamo).
Commuti da N-S a S-N e passi da I a III. O da II a IV. E viceversa, ovviamente.
Hai capito adesso?
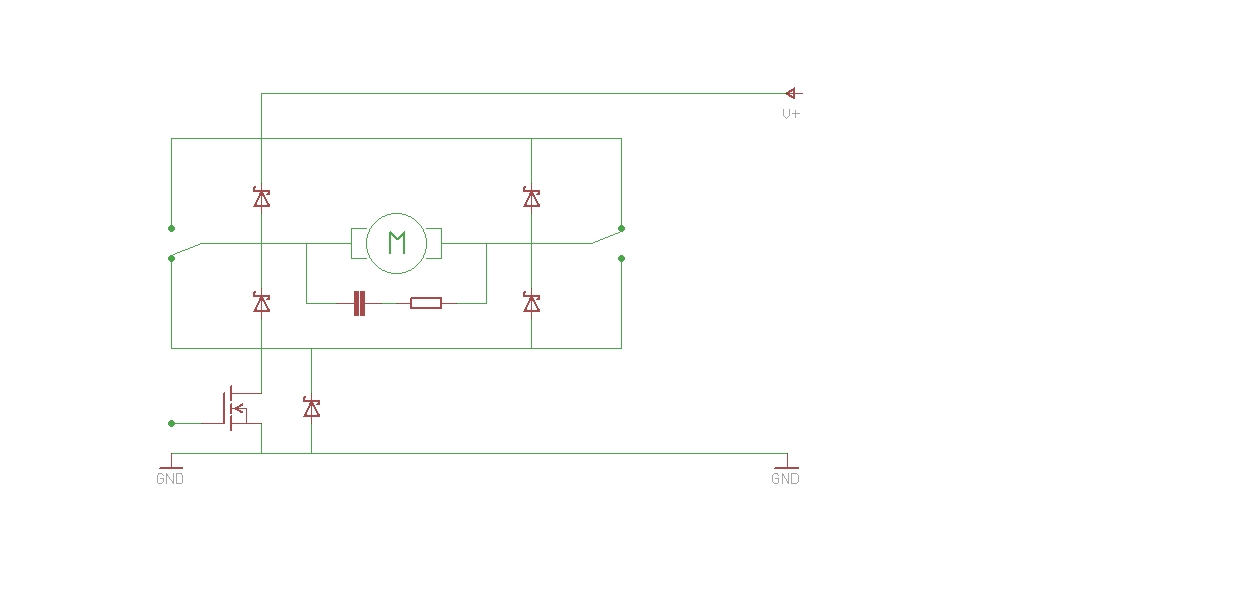
Il circuitino (acc...!) era solo un esempio.
Il MOSFET infatti non ha bisogno del damper volendo glielo lasci. Altrimenti ne metti 4 sugli scambi del rele', esattamente come su un ponte a H. Potremmo dire che, se usato per commutare stabilmente, il ponte a H e' isomorfo al rele' (bello!).
Quindi tutta la tua tirata sui 4 quadranti
lavori solo nel quadrante 1 ... gli altri tre ti sono interdetti, non serve aggiungere altro.
e con che tono poi... mi fai la cortesia di spiegare cosa significa?
Se tu stesso dici "... e mette letteralmente in corto (...) il generatore", secondo te non frena?
Ma tu hai capito cosa vuol dire 4 quadranti ? Chiaro che in frenatura il controllo e', diciamo, discreto...
Bene, fai finta che non ti abbia detto niente - a me non interessa fare polemiche.
Il mondo e' pieno di "tecnici" che cercano di intimidire il prossimo con il cosfi e simili, sono troppo vecchio e ti assicuro che ne ho sentiti tanti di questi discorsi.
Ma e' molto meglio capire i concetti che sperare di intimidire l' interlocutore (e perche' poi?) sparando sigle in inglese o con la minaccia dei formuloni.
Ciao
Ps: appena posso posto uno schema il piu' possibile corretto e completo.