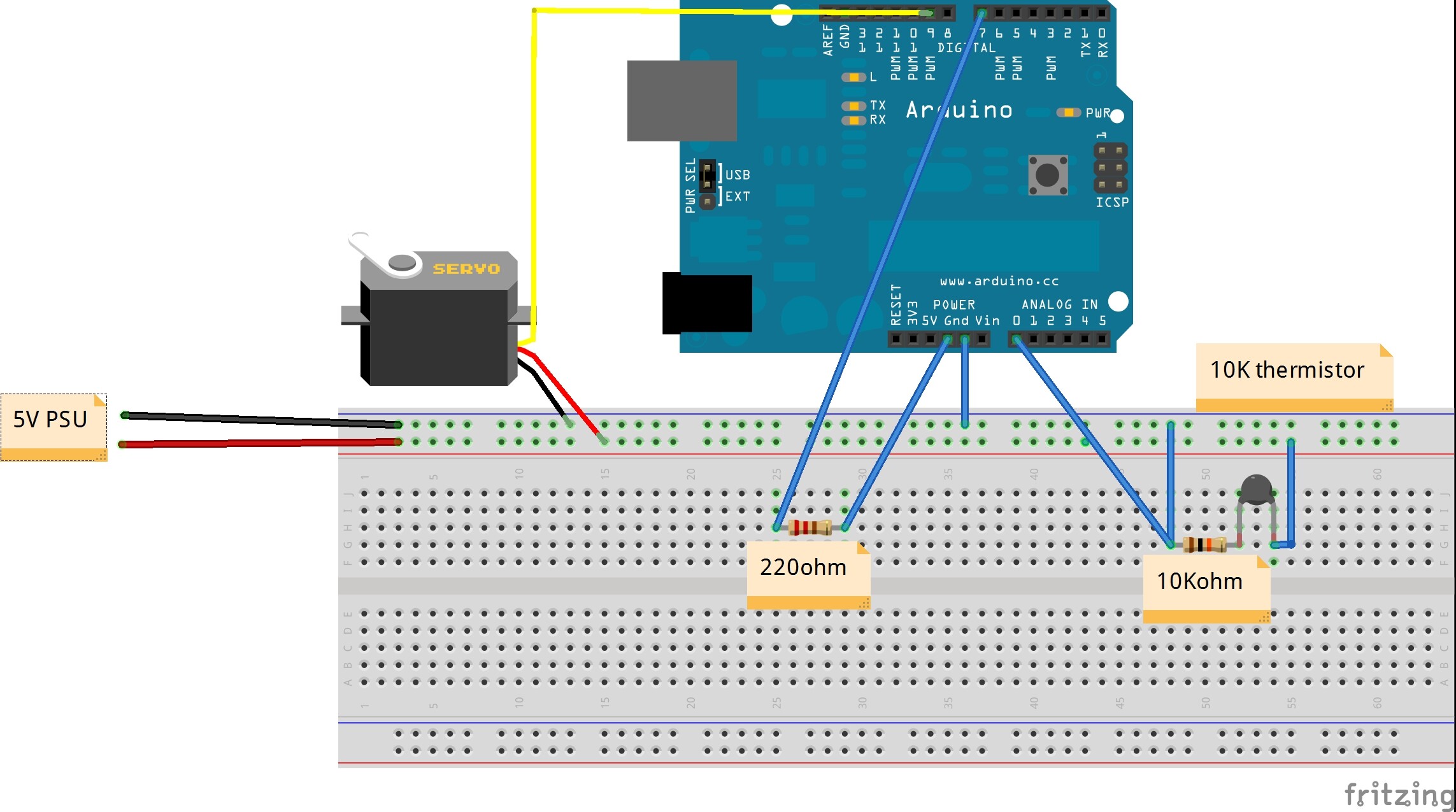
When I run this code, my servo pins hard left and stays there.
#include <Servo.h>
Servo myservo; // create servo object to control a servo
//Constants
const unsigned char CONTROL = 7; // digital pin used to detect if the system is on or off
const unsigned char temps = 0; // analog pin used to connect the temp sensor
const unsigned char MAX_VAL = 10;
//Main global varibles
char trigger = 0; // varible used to store the control pin value
unsigned int val; // variable to read the value from the analog pin
unsigned int updateAvgtemp(){
static int history[MAX_VAL]={0};
static unsigned char lastHist=0;
static unsigned char numHist=0;
unsigned int temp=0;
unsigned char counter=0;
unsigned char arcount=0;
history[lastHist] = analogRead(temps);
if(numHist<MAX_VAL)
++numHist;
arcount=lastHist;
++lastHist;
if(lastHist>=MAX_VAL)
lastHist=0;
temp=0;
counter=0;
do{
temp+=history[arcount];
arcount--;
if(arcount>MAX_VAL)
arcount=(MAX_VAL-1);
counter++;
}while(counter < numHist);
return (temp/numHist);
}
void setup()
{
pinMode (CONTROL, INPUT); // sets the control pin to input
myservo.attach(9); // attaches the servo on pin 9 to the servo object
digitalWrite(CONTROL, LOW); // ensure internal pullup resistor is disabled.
}
void loop()
{
trigger = digitalRead(CONTROL); // read input of pin CONTROL and store it
if (trigger == HIGH){ // reads if pin CONTROL, if true, do this:
val = updateAvgtemp(); // read the value of the temp sensor (value with range of 1024)
val = map(val, 350, 700, 80, 160); // scale it to use it with the servo (value between 160 and 80)
myservo.write(val); // sets the servo position according to the scaled value
}
else {
myservo.write(180); // sets servo position to 180 if above statement is false
}
delay(125); // wait 25ms for the servo to move to it's new position and also 100ms until it gets the new value
}
I have tried adjusting the 120, 80 positions (reversed them in this code). But not sure how to center or put my servo at 0. So it will then move according to temp from their.
What am I missing?