I'm building a project in which a servo motor (sg90) is used to open a lid of a wooden box.
I've attached an arm to the servo motor with a wheel at the end which I use to push open the lid (see attached photo).
The project is battery powered and the servo needs to hold the lid open for a few seconds.
It seems that holding the lid open causes the servo to draw a significant amount of current and when the batteries run slightly low this results in insufficient current to the arduino nano which is also connected to the same power source.
If I run the project with the lid open, there is no issue holding up the arm and running the arduino at the same time.
I'm looking for ways to reduce weight off the servo motor taking into account the small space I have.
Would appreciate any comment or suggestion.
What are you using as a power source and how is the servo connected to it ?
It is hard to see how it is configured now but if you arranged the geometry of the linkage so that there was little or no rotational force on the servo arm with the box open then the servo would not need to work so hard to keep the lid open.
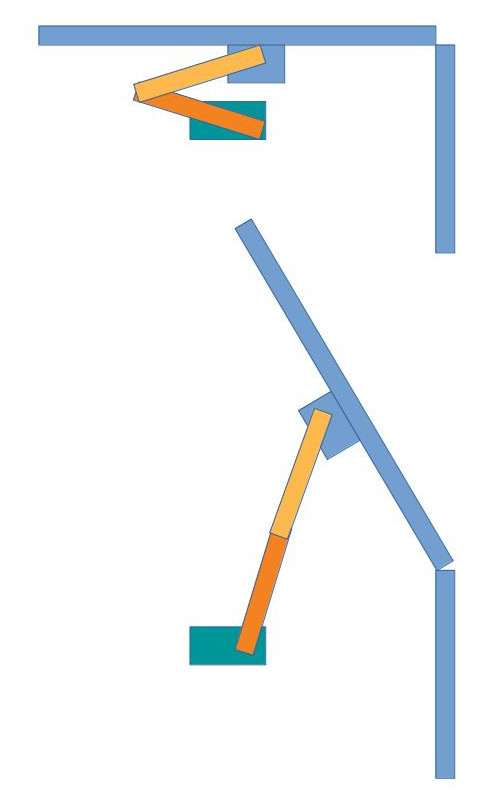
Rather than have a wheel I think there would be a lot less friction if you attach a lever to the lid like in this diagram. When the lid is open with the levers in a straight line there will be no torque load on the servo.
UKHeliBob:
What are you using as a power source and how is the servo connected to it ?
It is hard to see how it is configured now but if you arranged the geometry of the linkage so that there was little or no rotational force on the servo arm with the box open then the servo would not need to work so hard to keep the lid open.
I'm using 4AA batteries, the servo and the arduino are connected directly to the power source (in parallel).
I agree that reducing the rotational force would help, just not quite sure how to do it.
Robin2:
Rather than have a wheel I think there would be a lot less friction if you attach a lever to the lid like in this diagram. When the lid is open with the levers in a straight line there will be no torque load on the servo.
Thanks very much for the detailed reply and diagram. I've tried it, but for that to work the arm needs to be completely straight. With the pieces I have in hand i'ts quite impossible. Somehow I always get a bit of an angle which causes the problem to reoccur.
Robin2:
Isn't it just a matter of adjusting the lengths of the pieces making up the arm?
Or maybe moving the attachment point?
...R
It is, but unfortunately the parts I have do not form a perfect straight adjustment. This also causes another issue: my ability to open and close the lid manually becomes limited which makes it more difficult to fiddle with the other components inside.
meirgold:
True, it is a useless box indeed.
Using a different servo was one option but I think I would still face the lid resistance issue. Wouldn't I?
Same required force to open the lid....yes....but the MG995 is a much stronger servo.
Your box looks very impressive!
I've actually glued and soldered everything in place so removing the servo will be quite a pain. Unfortunately I wasn't as tidy as you with the wires and soldering.
I guess I'm looking for a different solution, maybe a torque hinge of some sort.
Anyway, thanks for the advice!
meirgold:
Your box looks very impressive!
I've actually glued and soldered everything in place so removing the servo will be quite a pain. Unfortunately I wasn't as tidy as you with the wires and soldering.
I guess I'm looking for a different solution, maybe a torque hinge of some sort.
Anyway, thanks for the advice!
Meir
Think I gave the wrong impression here in the link.
Just so we are on the same page,this was the one I copied.
Much the same though.