Hallo zusammen, ich bastel gerade an einer Servosteuerung, die über nen Fotowiderstand gesteuert werden soll. Die Problematik liegt darin, das 2 Servos über eine Lichtquelle angesteuert werden sollen. Heist bei Licht an passiert gar nix, Servos bleiben in ihrer vorher definierten Grundstellung. Beim ersten mal Licht ausschalten soll Servo 1 eine andere Stellung anfahren und dort bleiben. Nach einem erneuten einschalten wechselt die Schaltung zu Servo 2, der nach einer vorgegeben Anzahl an Aus.- und Einschaltungen des Lichtes(Anzahl sollte einstellbar sein) ebenfalls in seine andere Stellung fährt.
Der eine funktioniert ja schon, beim anderen dachte ich an einen Zähler der nach Einstellung Servo 2 schaltet. Leider bin ich wohl zu blöd dafür. Hat jemand eine verständliche lösung für mich? Danke schonmal im Voraus.
Bei zwei Servos würde ich auch zwei Pindefinitionen und zwei Instanzen von Servo erwarten. Außerdem sehe ich keinen Zähler für die Anzahl. Hilfreich wäre eine Variable, die den aktuellen Zustand des Systems abbildet und je nach Ereignis verändert wird (Stichwort state machine)
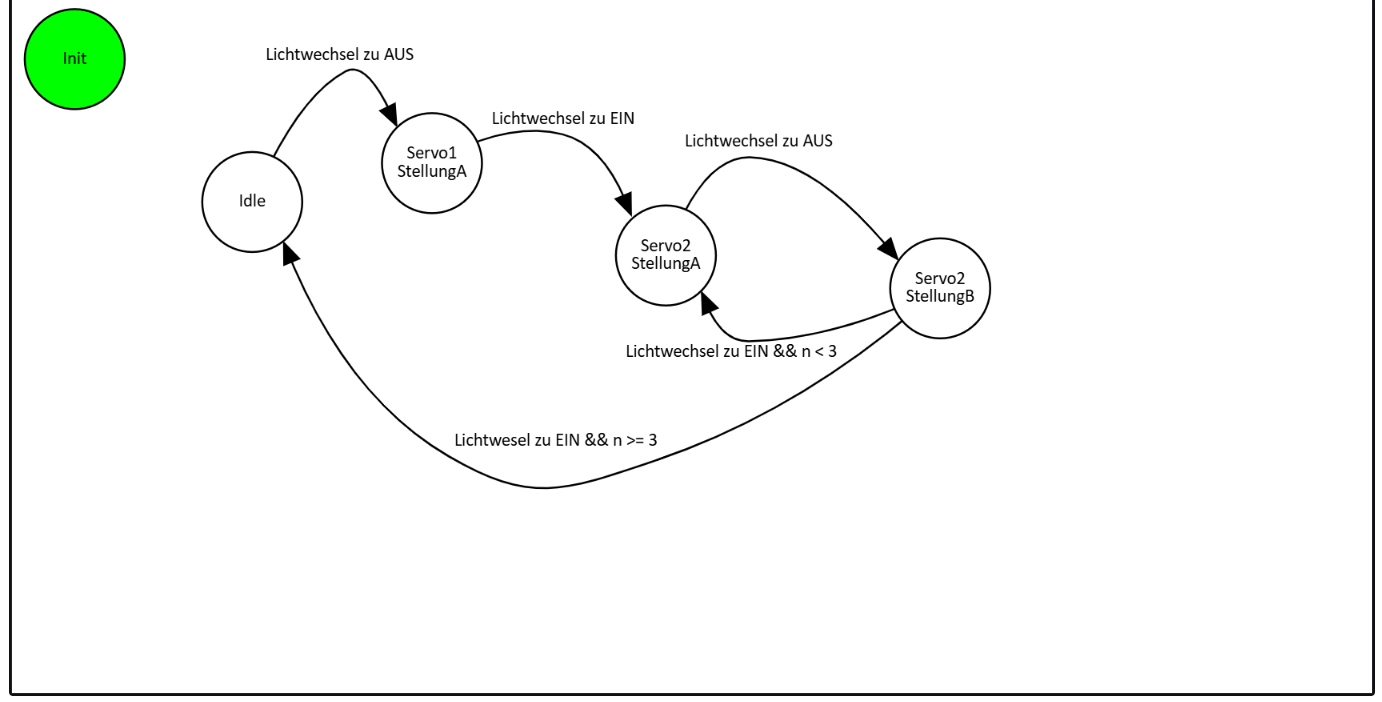
also für mich sieht das aus du möchtest eine State Machine.
Dazu definierst du dir welche Status es gibt, und wodurch man von einem Status in den anderen kommt.
Jetzt kann man das noch kritisch würdigen und feststellen, was beim letzten Lichtwechsel zu ein mit Servo 1 passieren soll, weil aktuell würde der in StellungA verharren.
Kann man aber mittels State Machine ändern.
Und übersichtlich ist es meines erachtens auch.
Das Problem ist folgendes, ich muss mit 1nem Licht das ich aus und einschalten kann 2 verschiedene Servos dazu bewegen eine Bewegung aus zu führen....beim einschalten der Schaltung müssen beide Servos in Hold Position bleiben, beim 1. Licht ausschalten der 1. Servo eine Bewegung machen, aber der 2. Servo darf die Bewegung erst nach dem 3. oder definierten Wert die bewegung machen.
Ich will wissen, ob der Code etwas macht und ob Du das beschreiben kannst.
Was dann daraus wird, schaun wa ma.
Das nennt sich dann Schrittkette - oder wie an anderer Stelle erwähnt StateMachine.