Hello guys,
I'm here having some problems with mcp2515 module with arduino uno.
I'm doing project which is control T motor with arduino using can bus communication.
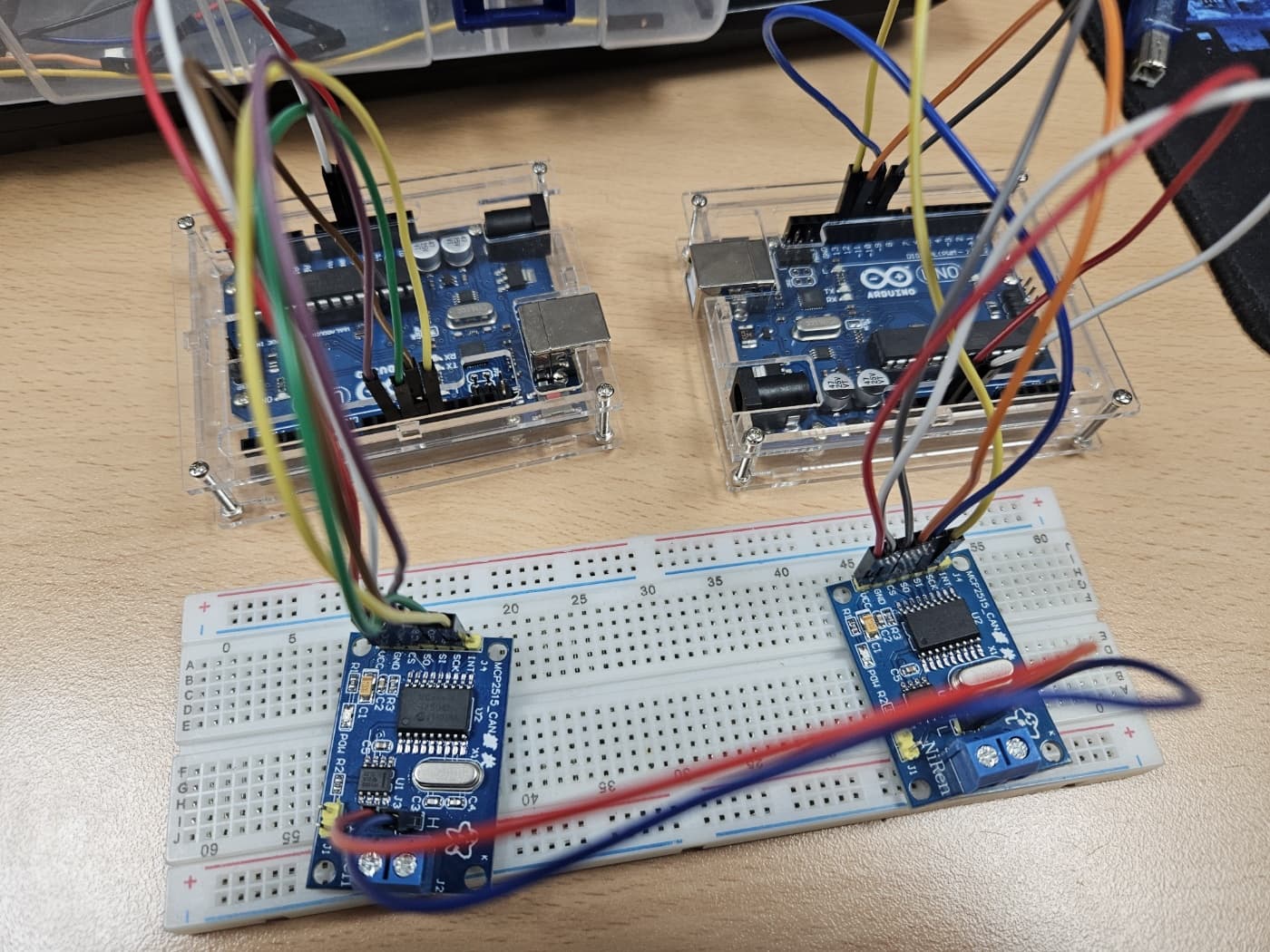
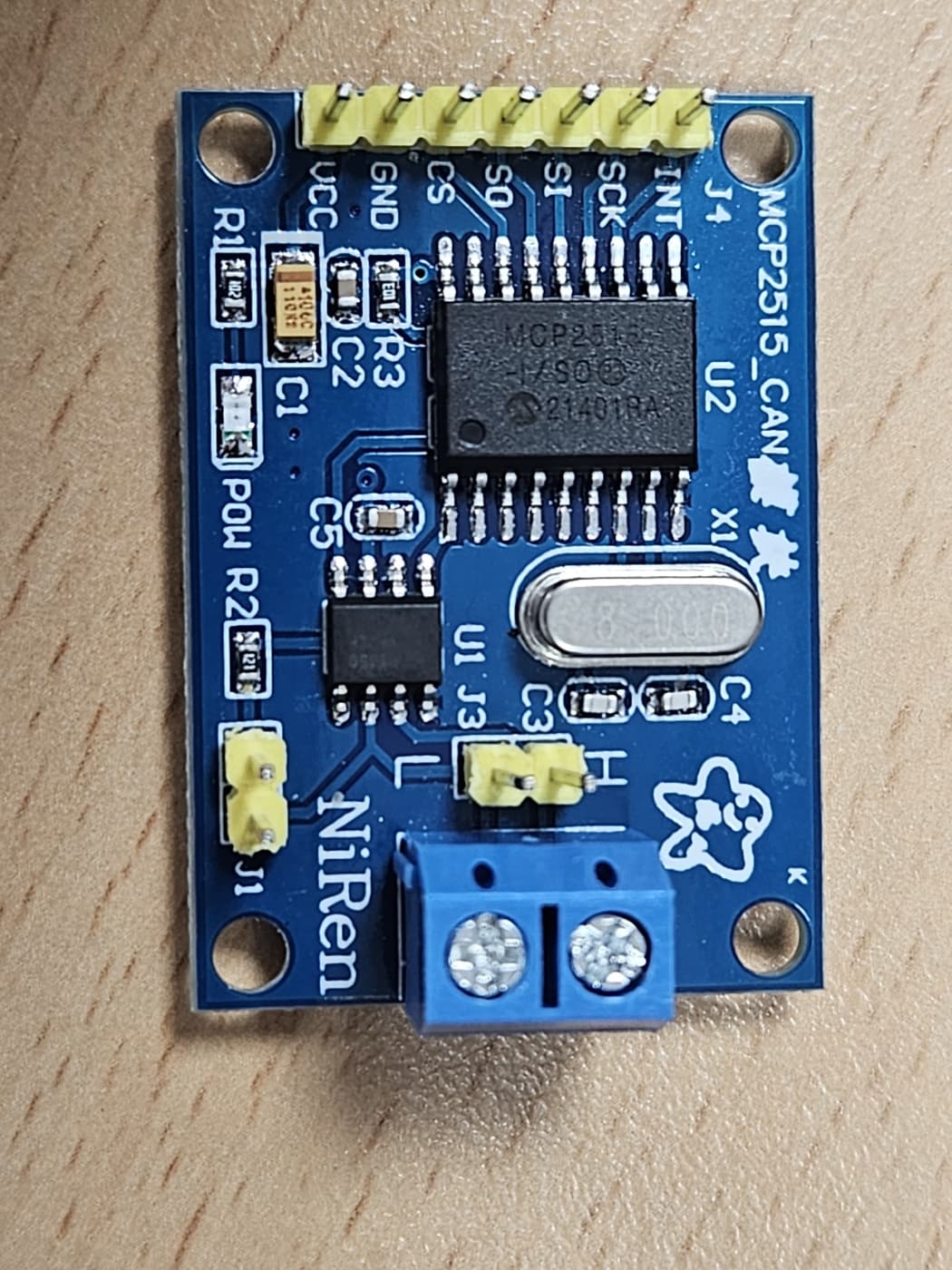
For hardware setup, I used arduino uno and mcp2515 moduel with 8MHz version.
Before connecting motor, I tried to connect 2 arduino uno with example of GitHub - coryjfowler/MCP_CAN_lib: MCP_CAN Library (can_send & can_receive).
When I run the example code, the can_send example output only "Error sending message..." and can't find the solutions......
Baudrate : 115200 | Using CAN_500KBPS |

// CAN Send Example
//
#include <mcp_can.h>
#include <SPI.h>
MCP_CAN CAN0(10); // Set CS to pin 10
void setup()
{
Serial.begin(115200);
// Initialize MCP2515 running at 16MHz with a baudrate of 500kb/s and the masks and filters disabled.
if(CAN0.begin(MCP_ANY, CAN_125KBPS, MCP_8MHZ) == CAN_OK) Serial.println("MCP2515 Initialized Successfully!");
else Serial.println("Error Initializing MCP2515...");
CAN0.setMode(MCP_NORMAL); // Change to normal mode to allow messages to be transmitted
}
byte data[8] = {0x00, 0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07};
void loop()
{
// send data: ID = 0x100, Standard CAN Frame, Data length = 8 bytes, 'data' = array of data bytes to send
byte sndStat = CAN0.sendMsgBuf(0x100, 0, 8, data);
if(sndStat == CAN_OK){
Serial.println("Message Sent Successfully!");
} else {
Serial.println("Error Sending Message...");
}
delay(1000); // send data per 100ms
}
/*********************************************************************************************************
END FILE
*********************************************************************************************************/
// CAN Receive Example
//
#include <mcp_can.h>
#include <SPI.h>
long unsigned int rxId;
unsigned char len = 0;
unsigned char rxBuf[8];
char msgString[128]; // Array to store serial string
#define CAN0_INT 2 // Set INT to pin 2
MCP_CAN CAN0(10); // Set CS to pin 10
void setup()
{
Serial.begin(115200);
// Initialize MCP2515 running at 16MHz with a baudrate of 500kb/s and the masks and filters disabled.
if(CAN0.begin(MCP_ANY, CAN_125KBPS, MCP_8MHZ) == CAN_OK)
Serial.println("MCP2515 Initialized Successfully!");
else
Serial.println("Error Initializing MCP2515...");
CAN0.setMode(MCP_NORMAL); // Set operation mode to normal so the MCP2515 sends acks to received data.
pinMode(CAN0_INT, INPUT); // Configuring pin for /INT input
Serial.println("MCP2515 Library Receive Example...");
}
void loop()
{
if(!digitalRead(CAN0_INT)) // If CAN0_INT pin is low, read receive buffer
{
CAN0.readMsgBuf(&rxId, &len, rxBuf); // Read data: len = data length, buf = data byte(s)
if((rxId & 0x80000000) == 0x80000000) // Determine if ID is standard (11 bits) or extended (29 bits)
sprintf(msgString, "Extended ID: 0x%.8lX DLC: %1d Data:", (rxId & 0x1FFFFFFF), len);
else
sprintf(msgString, "Standard ID: 0x%.3lX DLC: %1d Data:", rxId, len);
Serial.print(msgString);
if((rxId & 0x40000000) == 0x40000000){ // Determine if message is a remote request frame.
sprintf(msgString, " REMOTE REQUEST FRAME");
Serial.print(msgString);
} else {
for(byte i = 0; i<len; i++){
sprintf(msgString, " 0x%.2X", rxBuf[i]);
Serial.print(msgString);
}
}
Serial.println();
delay(1000);
}
}
/*********************************************************************************************************
END FILE
*********************************************************************************************************/