I sincerely apologize for that mistake. I wasnt thinking clearly. This is the main code of the Arduino. Don't mind the IR_remote.h and keymap.h because I think these are just for the IR remote.
#include "IR_remote.h"
#include "keymap.h"
IRremote ir(3);
#include <Servo.h>
Servo servo_10;
volatile char BLE_bit_temp;
String BLE_value;
String BLE_value_temp;
String G_Bluetooth_value;
volatile int G_degree;
volatile int re_string_len;
volatile float Left_photosensitive;
volatile float Right_photosensitive;
volatile int Lightseeking_Degree;
volatile float f;
volatile int speed_value;
volatile int D_mix;
volatile int D_mid;
volatile int D_max;
volatile boolean Funtion_FLag;
volatile int G_string_len;
volatile int BLE_Change_SPEED;
volatile float V_Servo_angle;
volatile int Left_Tra_Value;
volatile int Center_Tra_Value;
volatile int Right_Tra_Value;
volatile int Black;
volatile int white;
volatile int Front_Distance;
volatile char IR_Car_Mode;
volatile boolean IR_Mode_Flag;
void Infrared_Tracing() {
Left_Tra_Value = digitalRead(7);
Center_Tra_Value = digitalRead(8);
Right_Tra_Value = digitalRead(9);
if (Left_Tra_Value != Black && (Center_Tra_Value == Black && Right_Tra_Value != Black)) {
Move_Forward(120);
} else if (Left_Tra_Value == Black && (Center_Tra_Value == Black && Right_Tra_Value != Black)) {
Rotate_Left(80);
} else if (Left_Tra_Value == Black && (Center_Tra_Value != Black && Right_Tra_Value != Black)) {
Rotate_Left(120);
} else if (Left_Tra_Value != Black && (Center_Tra_Value != Black && Right_Tra_Value == Black)) {
Rotate_Right(120);
} else if (Left_Tra_Value != Black && (Center_Tra_Value == Black && Right_Tra_Value == Black)) {
Rotate_Right(80);
} else if (Left_Tra_Value == Black && (Center_Tra_Value == Black && Right_Tra_Value == Black)) {
STOP();
}
}
void Move_Forward(int car_speed) {
digitalWrite(2,HIGH);
analogWrite(5,car_speed);
digitalWrite(4,LOW);
analogWrite(6,car_speed);
}
void Move_Backward(int car_speed) {
digitalWrite(2,LOW);
analogWrite(5,car_speed);
digitalWrite(4,HIGH);
analogWrite(6,car_speed);
}
void Rotate_Left(int car_speed) {
digitalWrite(2,LOW);
analogWrite(5,car_speed);
digitalWrite(4,LOW);
analogWrite(6,car_speed);
}
void Rotate_Right(int car_speed) {
digitalWrite(2,HIGH);
analogWrite(5,car_speed);
digitalWrite(4,HIGH);
analogWrite(6,car_speed);
}
void STOP() {
digitalWrite(2,LOW);
analogWrite(5,0);
digitalWrite(4,HIGH);
analogWrite(6,0);
}
float checkdistance() {
digitalWrite(12, LOW);
delayMicroseconds(2);
digitalWrite(12, HIGH);
delayMicroseconds(10);
digitalWrite(12, LOW);
float distance = pulseIn(13, HIGH) / 58.00;
delay(10);
return distance;
}
void Ultrasonic_Avoidance() {
Front_Distance = checkdistance();
if (Front_Distance <= 10) {
Move_Backward(100);
delay(200);
if (50 >= random(1, 100)) {
Rotate_Left(100);
} else {
Rotate_Right(100);
}
delay(500);
} else if (Front_Distance >= 10 && Front_Distance <= 20) {
STOP();
delay(200);
if (50 >= random(1, 100)) {
Rotate_Left(100);
} else {
Rotate_Right(100);
}
delay(500);
} else if (Front_Distance > 20) {
Move_Forward(70);
}
}
void Ultrasonic_Follow() {
Front_Distance = checkdistance();
if (Front_Distance <= 5) {
Move_Backward(80);
} else if (Front_Distance >= 5 && Front_Distance <= 10) {
STOP();
} else if (Front_Distance > 20) {
Move_Forward(100);
}
}
/*
IR_KEYCODE_1->Button 1
IR_KEYCODE_2->Button 2
IR_KEYCODE_3->Button 3
IR_KEYCODE_4->Button 4
IR_KEYCODE_5->Button 5
IR_KEYCODE_6->Button 6
IR_KEYCODE_7->Button 7
IR_KEYCODE_8->Button 8
IR_KEYCODE_9->Button 9
IR_KEYCODE_0->Button 0
IR_KEYCODE_STAR->Button *
IR_KEYCODE_POUND->Button #
IR_KEYCODE_UP->Button UP
IR_KEYCODE_DOWN->Button DOWN
IR_KEYCODE_OK->Button OK
IR_KEYCODE_LEFT->Button LEFT
IR_KEYCODE_RIGHT->Button RIGHT
*/
void IR_remote_control() {
switch (IR_Car_Mode) {
case 'b':
Move_Backward(110);
delay(300);
STOP();
IR_Car_Mode = ' ';
break;
case 'f':
Move_Forward(110);
delay(300);
STOP();
IR_Car_Mode = ' ';
break;
case 'l':
Rotate_Left(110);
delay(300);
STOP();
IR_Car_Mode = ' ';
break;
case 'r':
Rotate_Right(110);
delay(300);
STOP();
IR_Car_Mode = ' ';
break;
case 's':
STOP();
IR_Car_Mode = ' ';
break;
case '+':
V_Servo_angle = V_Servo_angle + 3;
if (V_Servo_angle >= 180) {
V_Servo_angle = 180;
}
servo_10.write(round(V_Servo_angle));
delay(0);
IR_Car_Mode = ' ';
break;
case '-':
V_Servo_angle = V_Servo_angle - 3;
if (V_Servo_angle <= 0) {
V_Servo_angle = 0;
}
servo_10.write(round(V_Servo_angle));
delay(0);
IR_Car_Mode = ' ';
break;
}
if (ir.getIrKey(ir.getCode(),1) == IR_KEYCODE_UP) {
IR_Car_Mode = 'f';
IR_Mode_Flag = true;
} else if (ir.getIrKey(ir.getCode(),1) == IR_KEYCODE_LEFT) {
IR_Car_Mode = 'l';
IR_Mode_Flag = true;
} else if (ir.getIrKey(ir.getCode(),1) == IR_KEYCODE_DOWN) {
IR_Car_Mode = 'b';
IR_Mode_Flag = true;
} else if (ir.getIrKey(ir.getCode(),1) == IR_KEYCODE_RIGHT) {
IR_Car_Mode = 'r';
IR_Mode_Flag = true;
} else if (ir.getIrKey(ir.getCode(),1) == IR_KEYCODE_OK) {
IR_Car_Mode = 's';
IR_Mode_Flag = true;
} else if (ir.getIrKey(ir.getCode(),1) == IR_KEYCODE_2) {
IR_Car_Mode = '+';
IR_Mode_Flag = true;
} else if (ir.getIrKey(ir.getCode(),1) == IR_KEYCODE_8) {
IR_Car_Mode = '-';
IR_Mode_Flag = true;
}
}
void setup(){
Serial.begin(115200);
servo_10.attach(10);
pinMode(7, INPUT);
pinMode(8, INPUT);
pinMode(9, INPUT);
BLE_bit_temp = ' ';
BLE_value = "";
BLE_value_temp = "";
G_Bluetooth_value = "";
G_degree = 0;
re_string_len = 0;
IRremote ir(3);
Left_photosensitive = 0;
Right_photosensitive = 0;
Lightseeking_Degree = 0;
f = 0;
speed_value = 200;
D_mix = 5;
D_mid = 10;
D_max = 400;
Funtion_FLag = false;
G_string_len = 0;
BLE_Change_SPEED = 60;
V_Servo_angle = 90;
Left_Tra_Value = 1;
Center_Tra_Value = 1;
Right_Tra_Value = 1;
Black = 1;
white = 0;
Front_Distance = 0;
IR_Car_Mode = ' ';
IR_Mode_Flag = false;
servo_10.write(V_Servo_angle);
delay(0);
pinMode(2, OUTPUT);
pinMode(5, OUTPUT);
pinMode(4, OUTPUT);
pinMode(6, OUTPUT);
pinMode(12, OUTPUT);
pinMode(13, INPUT);
}
void loop(){
while (true) {
while (Serial.available() > 0) {
BLE_value_temp = BLE_value_temp + ((char)(Serial.read()));
delay(2);
if (!Serial.available() > 0) {
BLE_value = BLE_value_temp;
BLE_value_temp = "";
}
}
if (0 < String(BLE_value).length()) {
if (4 >= String(BLE_value).length()) {
if ('%' == String(BLE_value).charAt(0) && '#' == String(BLE_value).charAt((String(BLE_value).length() - 1))) {
if (IR_Mode_Flag == true) {
STOP();
IR_Car_Mode = ' ';
IR_Mode_Flag = false;
}
switch (String(BLE_value).charAt(1)) {
case 'H':
V_Servo_angle = V_Servo_angle + 4;
if (V_Servo_angle >= 180) {
V_Servo_angle = 180;
}
servo_10.write(round(V_Servo_angle));
delay(0);
BLE_value = "";
break;
case 'G':
V_Servo_angle = V_Servo_angle - 4;
if (V_Servo_angle <= 0) {
V_Servo_angle = 0;
}
servo_10.write(round(V_Servo_angle));
delay(0);
BLE_value = "";
break;
case 'F':
Move_Forward(110);
delay(400);
BLE_value = "";
break;
case 'B':
Move_Backward(110);
delay(400);
BLE_value = "";
break;
case 'L':
Rotate_Left(110);
delay(250);
BLE_value = "";
break;
case 'R':
Rotate_Right(110);
delay(250);
BLE_value = "";
break;
case 'T':
Infrared_Tracing();
break;
case 'S':
BLE_value = "";
STOP();
break;
case 'A':
Ultrasonic_Avoidance();
break;
case 'Z':
Ultrasonic_Follow();
break;
}
}
} else {
BLE_value = "";
STOP();
}
} else {
STOP();
}
IR_remote_control();
}
}
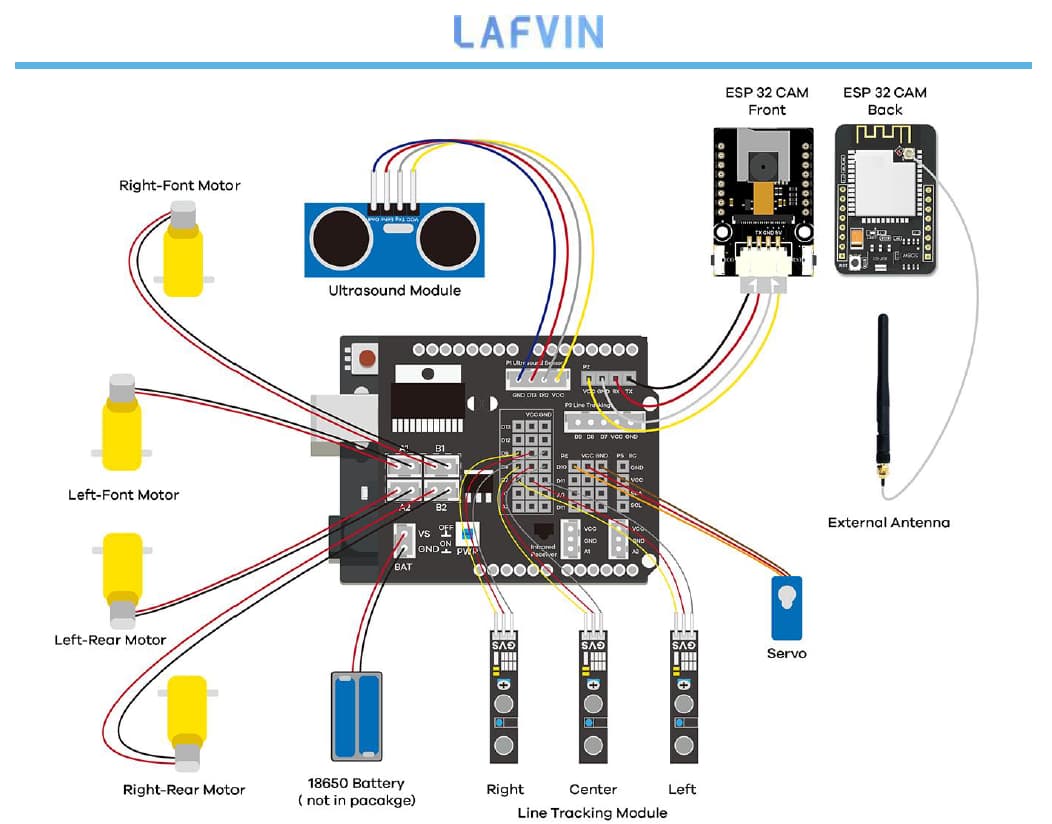
Also, this is the schematic of the robot car:
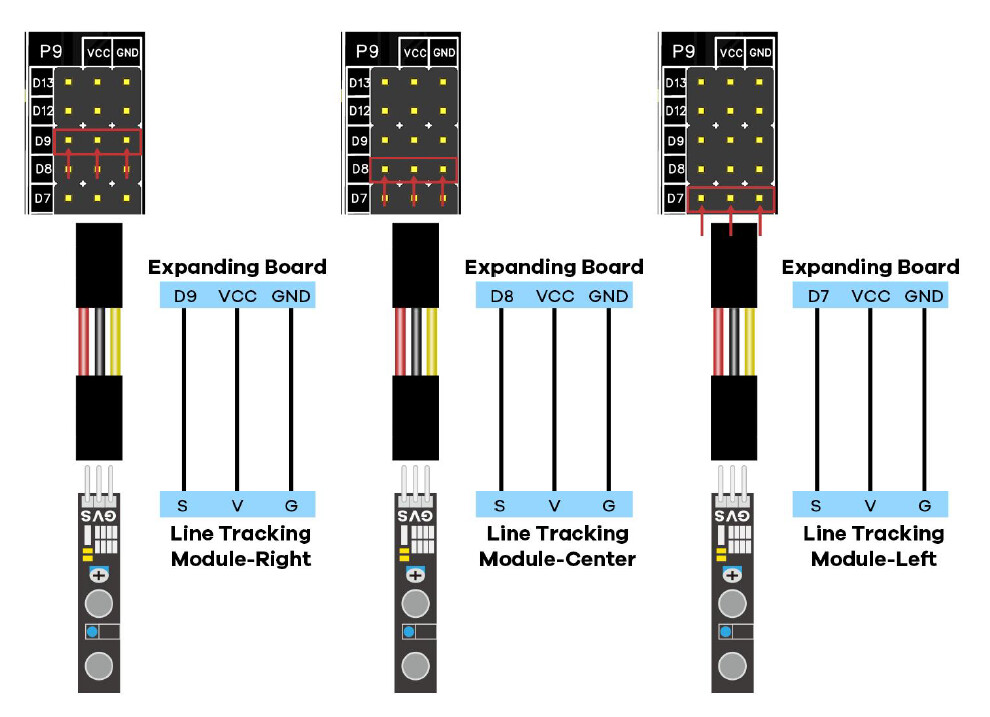
For line tracking:
For the Ultrasonic, ESP32 CAM, and the line tracking