*i want to build a fastest arduino based linefollower robot...
*should i choose QTR-8A reflectance sensor array or can i go with 5 different sensors...(or) are there any sensors that will serve my job(it must also detect the the difference in background i.e.,white background and black background)
*please reply me fast..plese do give me some suggestions necessary..
The speed of the thing following the line has little relationship to the speed of the sensors detecting the line. The speed of the thing following the line is more a function of how fast you can analyze the sensor data, make decisions, and change directions. Pick a sensor, and work on making the robot or whatever use the data from that sensor as fast as possible.
Only if you can prove that the sensor is the slow part should you worry about changing sensors.
Hi,
Multiple sensors is key from what I've seen. You can make your own array of reflective sensors or discrete IR LEDs and Photodetectors.
Here's a sensor array that worked for a pretty fast robot: http://yourduino.com/sunshop2/index.php?l=product_detail&p=295 (See the video)..
Some details and code on the http://ArduinoInfo.Info WIKI here: http://arduino-info.wikispaces.com/Robot+7-wayMultiTrackingSensor
DISCLAIMER: Mentioned stuff from my own shop...
hemanth_shaolin:
*i want to build a fastest arduino based linefollower robot...
Have you created a line follower robot?
The steps to make a fast line follower are:
- Make a working line follower
- Make it faster
Don't worry about speed until you have got something that works.
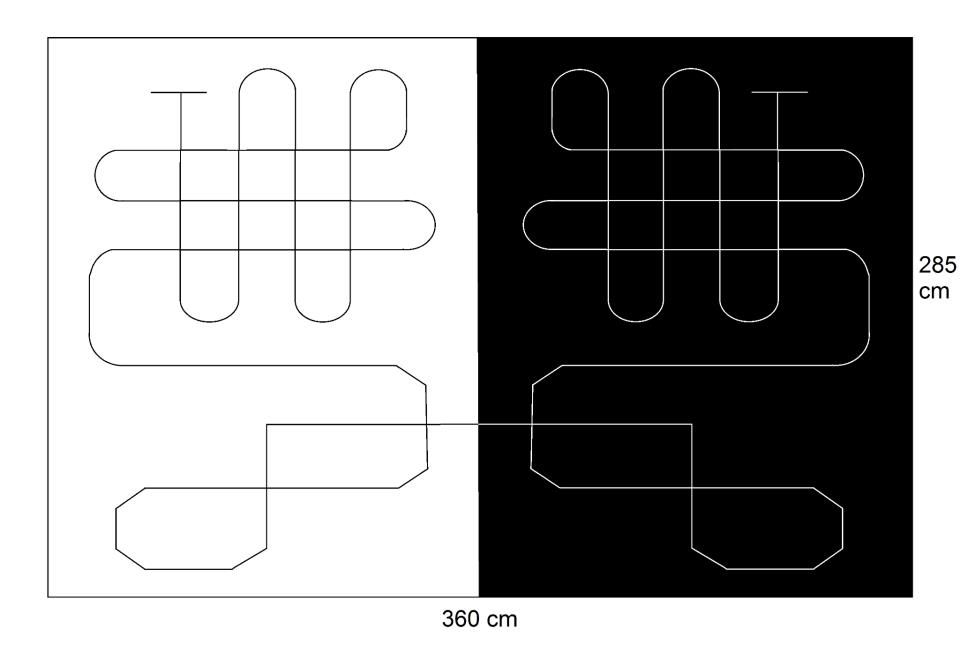
please do any one help me on this track...
this is a track of line follower bot...the bot must complete in the least time...i wanna use arduino uno
suggest me on
*what are the sensors that are to be used and
*design of the bot
*source code...........
i have some ideas and im on it but waiting for the best suggestions...
*what are the sensors that are to be used and
*design of the bot
*source code...........
And your input will be...financial?
All answers to this question can be found here: fast line follower
Lots and lots of reading material!
Lots and lots of reading material!
Cool! I was thinking that PID would be a good approach.
An array of sensors can return more than On or Off the line, but "how far off". How can that kind of information be input to a PID algorithm??
ON5MF DE WB1FQH TNX ES 73
hemanth_shaolin:
i have some ideas and im on it but waiting for the best suggestions...
Don't wait. Get something working. A million people have implemented something similar so there is plenty of information available for inspiration. But if you want to make one, go ahead and actually make one. Don't bother about making it perfect - just try and keep trying until it works, and then work on improving it if you want. Don't just wait for somebody to give you the design for the ultimate line follower.
If you aren't actually bothered about it being your own work, and just want to turn up at the competition and impress everyone with your plagiarism, there are plenty of working examples that you could simply copy. Personally I think that's a waste of time and I'm not going to help or encourage you to do that, but if that's your style you don't need our help to do it.