Ok so before i start let me just say i know this is a little advanced for my first project but my girl wants a life size BB8. I've see other threads about this but not exactly what I'm trying to do. I want it autonomous an to be able to follow. Here's what I have so far.
The head will be in control with a arduino uno, it will be Bluetoothed to my phone. Connected by a BlueSmirf Gold Bluetooth module. It will also control the sensor unit. I'm having trouble deciding what sensor systems to use...
The body will contain an arduino uno itself, slaved by another BlueSmirf Bluetooth module. The head relays the sensor info via Bluetooth to the arduino in the body to the polloi VNHS019 motor diver. I also want him to play autofiles. But I can't decide if either arduino can fit it in.
I'm looking for a way to switch from the follow an the autonomous settings. Any advice would be greatly appreciated.
O
you interrupt out of autonomous mode, check who interrupted and what they want, then override the autonomous settings to do what is required, do it until achieved, then put the autonomous settings back to default and start all over again.
or, plunk down about $250USD and buy one of those bluetooth controlled minitures. They also cone in R2D2.
Question 1: Just curious, but what material will the BB8 be made of? Will it be pre made, or will building the frame be another part of your project?
Question 2: Why use two Arduinos? You can save a bit of trouble and costs if you consolidate with one Arduino. My main concern is that using only two Bluetooth modules to communicate between two Arduinos AND a PC might cause problems. You should use either one Arduino and one BT module or two Arduinos with 3 BT modules.
Question 3: How many motors are you using?
Question 4: How much electronics/circuit design/coding experience do you have?
The frame will be made of fiberglass. An the reason I decided to use two is because the sensors need to go in the head and motor drive need to the body they need to be linked together wirelessly. I'm using 3 motors, 2 to move him 1 to move the head side to side.
I've decided I'm going to drop the phone control's. The electronics and circuit design should be no problem but the coding will be my biggest problem. That an choosing the right sensors for what I need (to be autonomous then switched to follow mode to follow a specific target around)
Why would it be hooked to a pc? Other then to program the Arduino Uno shouldn't it be a stand-alone unit?
I forgot, I meant Phone instead of PC.
You still haven't answered my question about how much electronics/coding experience you have. It may not seem important to tell us now, but it does. If you don't have any experience in circuit analysis, you might benefit from some tips/tricks we would otherwise not give to more knowledgeable members. Same goes for coding.
As for sensors, you can use IR distance sensors (max range of usually 100cm) or ultrasonic distance sensors (not sure about the max range). Unless you need long range distance sensing, IR sensors are your best bet. You might also need a 90g servo to rotate the distance sensor, but that's up to you.
Do you have the motors picked out?
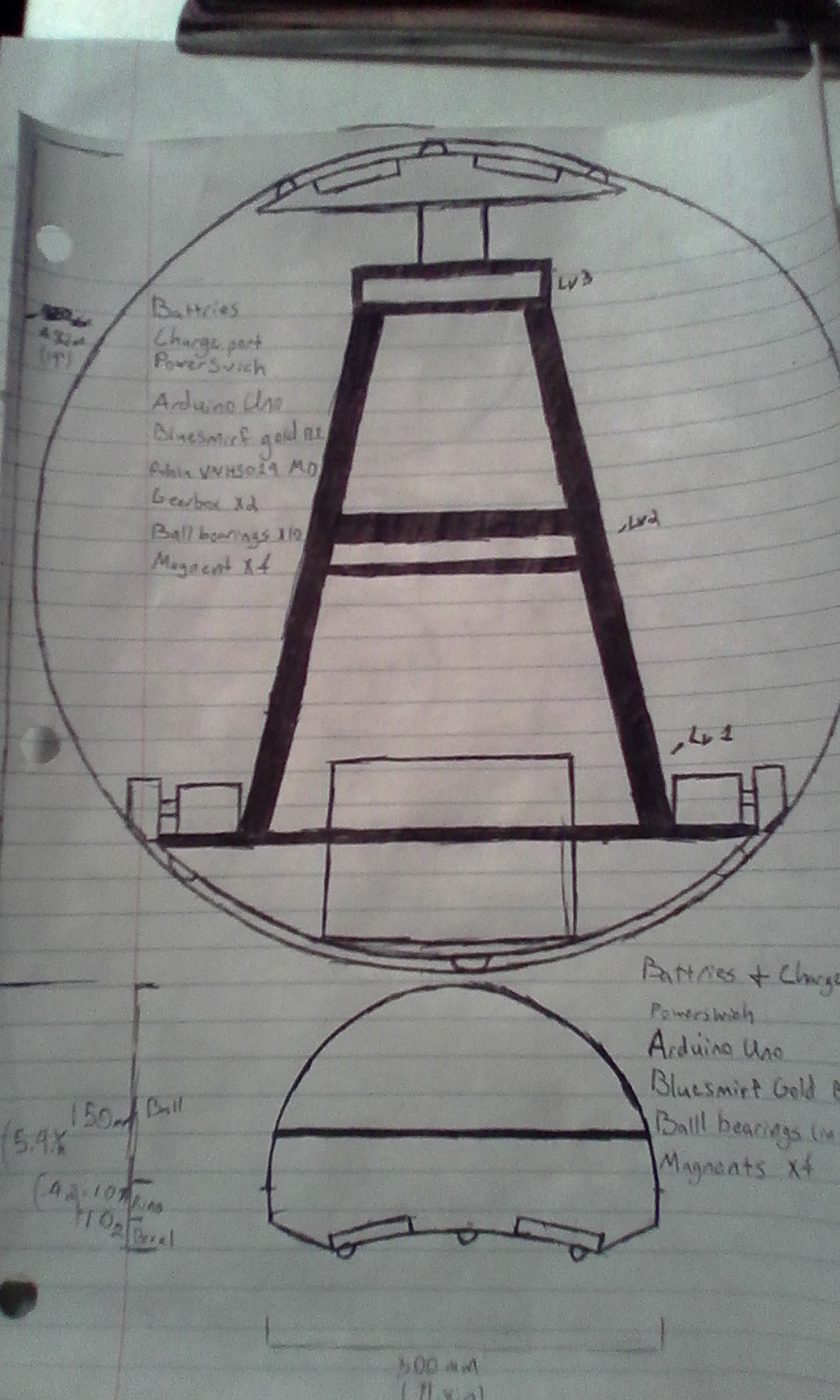
I don't have any coding experience my buddy was teaching me circuit design but he left for college before he got to the coding. I've attached my design plans to the main post. I haven't decided on any specific parts except the Arduino Uno units I just wanted to make sure my design an consept were sound before I went any further.
Is it possible to do both ultrasonic and IR together?
Hi,
How is the system to know which way the "head" is pointing with respect to the "body".
If the sensor in the head says FWD, you will need to know the orientation of the body to go in the FWD direction of the head.
I would say, because you are still learning, forget the autonomous, child following part, and just get the BB8 running for a start.
Have you checked out the YouTube videos?
Tom.... 
@lonelynx84, do not cross-post. Other thread removed.
lonelynx84:
I don't have any coding experience my buddy was teaching me circuit design but he left for college before he got to the coding. I've attached my design plans to the main post. I haven't decided on any specific parts except the Arduino Uno units I just wanted to make sure my design an consept were sound before I went any further.
Honestly, I can't say for sure whether or not this plan is sound. This is a very irregular "vehicle" that has a lot going on. As someone with a bit of experience in both coding and electronics, (I know others on this thread have much more, but still), I'd have trouble myself with such a project. I'm not trying to discourage you, I'm just saying, "fasten your seatbelt for a wild design ride." It's not impossible, but difficult.
By the way, have you researched teardowns of the toy BB8 currently being sold? Maybe info like that will help a lot. BB8 Teardown
Another sensor you might consider is the small, powerful, and easy to use MPU6050 accelerometer/gyroscope. This will give you motion/orientation data. Google it, it's pretty cool. You might be able to use it, but the how is up to you. MPU6050
Also, you should lookup tutorials on self balancing robots for Arduino. I know this isn't really what you're trying to do here, but it's worth a look.
Lastly, you'll probably need to implement a PID (Proportional Integral Derivative) control loop. Try doing some research and let us know if you don't understand any of it. PID Vid
lonelynx84:
Is it possible to do both ultrasonic and IR together?
Yes, you can incorporate any number of various sensors you want (provided you have enough pins available on your Arduino).
lonelynx84:
Is it possible to do both ultrasonic and IR together?
Yes, but ultrasonic tend to be noise sensitive and hard to use when you need exact data.. And with about 30-40cm range.
Ok so I did a little more shopping research lol the body's innards are as follows
Battery (rechargeable 9Vs)
Charger Port
Power Swich
I've decided to go with the Arduino Mega (but I need the dimensions.)
It will run
Bluetooth Gold Bluetooth module
I need a motor drive to move 2 gearboxes.
DC3 - 6V 1:48 Motor Grarbox kit W/65mm Rubber Wheels.
And two Stepper motors one large to orient the magnets that control the head side to side an one to pivot back an forth.
A Arduino 120801 Micro SD Card Reading and Writing Board
Micro Speakers Loudspeakers 28mms 8ohm 8r 1W
The head I'm hoping to stay with the
Arduino Uno
Batteries (rechargeable 9Vs)
Charger Port
Power switch
Bluesmirf Gold Bluetooth
3 Sharp GP2Y0A60SZ Analog Distance Sensor
1 650Nm Laser Diode Sensor
Could the uno handle all that?
An I kinda wanna add another laser diode to the head...
Looks good to me except for one thing: It might be better to use rechargeable 2 cell LiPo batteries instead of 9Vs. The LiPos will usually give you more lifetime between charges than 9Vs.
Ok but what size? How much Power do you think I'll need? An remember I need two diff batteries. One in the head an one in the body.
An I've been looking into beacons is there any way to attach it to say my phone by BT an keep him within 5ft of me while still being autonomous?