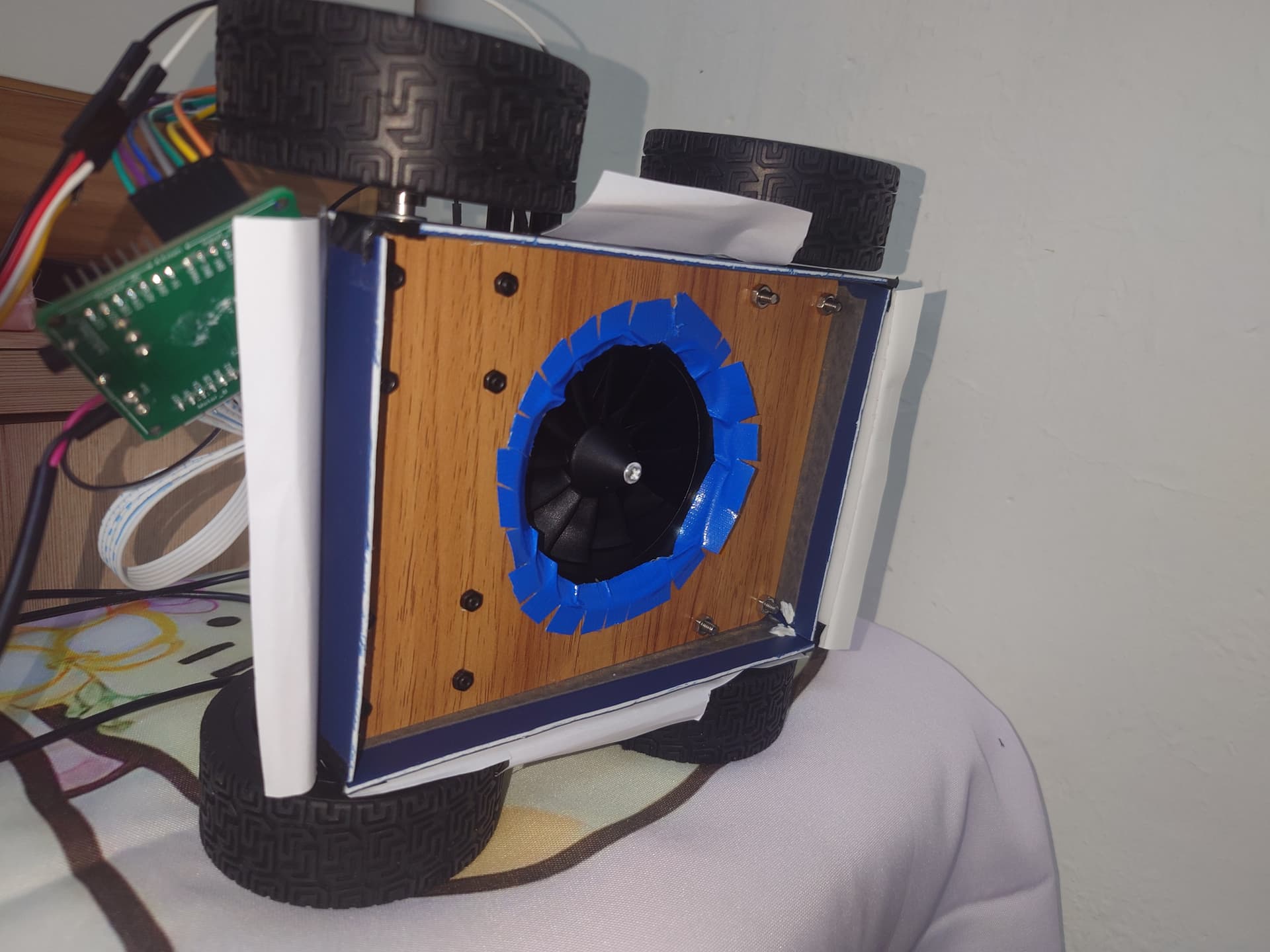
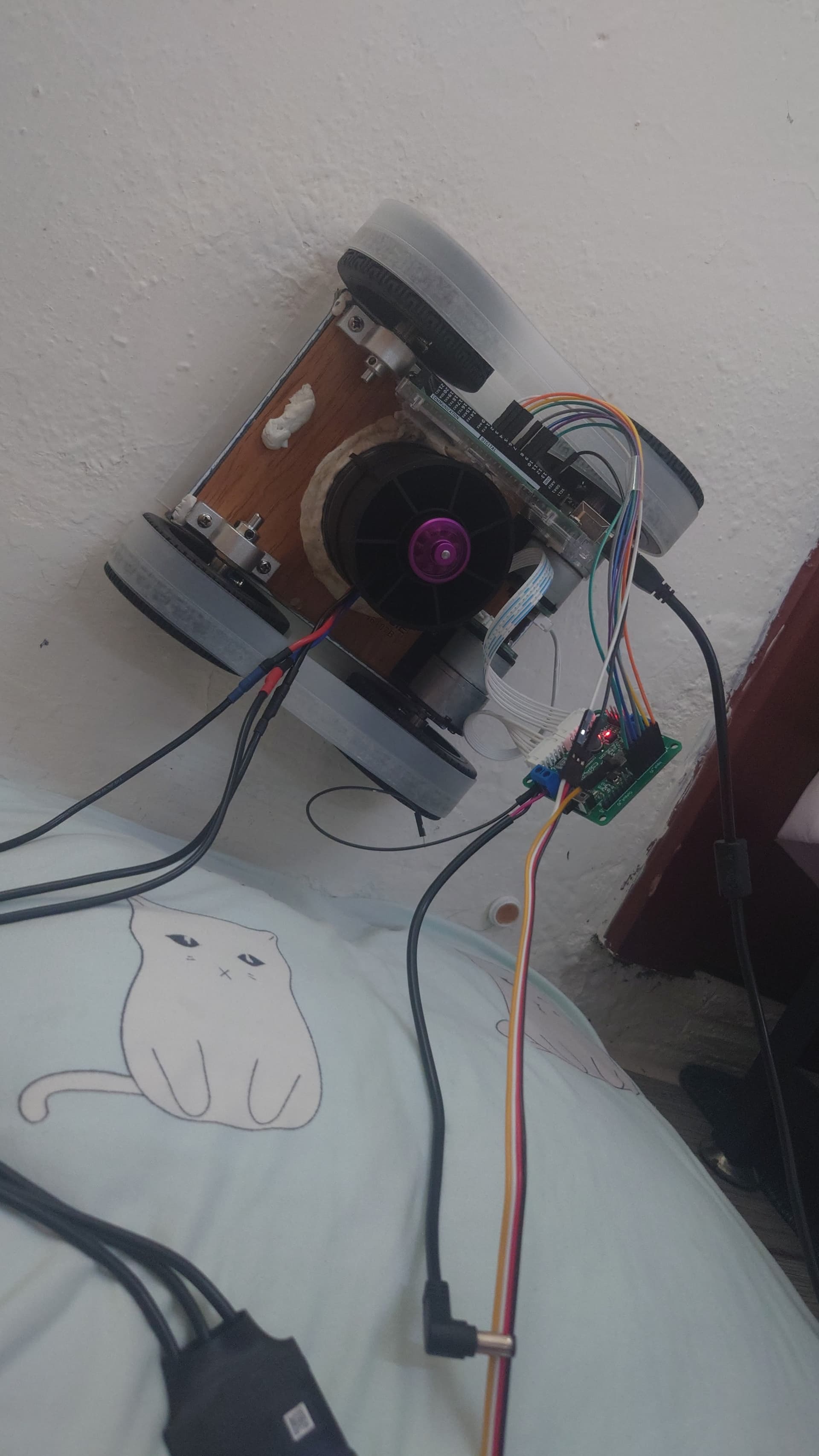
Hi guys, I really need some help with my wall climbing machine project. For the past few months, I have changed the design again and again, but I still failed. Please tell me some ways or methodologies to make it work. Here are some photos of my current design.
So, the machine "sticks" to the wall by using the fan in the middle to pull air out, creating a low-pressure area beneath the robot. The blue rectangular space acts as the low-pressure chamber. The two motors are for controlling the wheels. During operation, I have two major problems right now: 1. The machine slips when it is vertical. As one of the photos shows, the machine can "stick" sideways, but the wheel will spin, and the machine slips when it is vertical. I think the reason is that there is not enough normal force and/or friction. I tried to wrap the two wheels with a handmade plastic belt, but it still wouldn't work. 2. High throttle is needed. I am using around 90% throttle to make the machine even possible to work, which means either my fan is not strong enough or the efficiency is very bad.
Here are some specs for the machine if it helps. The total weight is around 1.3kg (the wheels motors are very heavy tbh), and the EDF fan is 70mm 6S 2300KV with a full thrust of around 2.2k grams. The pressure chamber is 17.5cm long, 13cm wide and 2cm tall. The air gap between the pressure chamber and the wall is 1mm. I have seen designs with way heavier weight and weaker fan, yet his works fine, but mine doesn't (ref: https://www.youtube.com/watch?v=0UTFLwNDz0c).
I really need some help as this project is really stressing me out. Thanks in advance.
I could not tell that the vehicle in the video weighed way more and had a weaker fan.
One thing it does enough of (barely it seems) is surface area of traction - those belts are many square centimeters large. Your wheels even if soft and deformed have a tiny fraction of that.
So is the guy in the video. My instant question was, yeah cute, but for how long? Any battery on that vehicle is not going to give very much running time.
Get the car to stick onto a plank of wood, than add weights to the wood till it falls off. Calculate the total weight of the plank + weights. This should give you an idea of whether it is the fan at fault. If the weight of the car is greater than the total weight of the plank + weights, then we have a problem. Also don't worry if you get varying results from the video you have referred, since even tiny unknown differences can affect your result
I wondered about that but as the tracks are not being held in contact with the wall when it is climbing I doubt that it makes much difference in practice
That is not what I see. The vehicle is pushed against the wall by atmospheric pressure somehow, the tractor treads are very much contacting the wall, I thought, as how else are they making it go anywhere?
The skirt is not in the plane of the treads. A small gap is made smaller with the force of the fan, this results in pressure on the treads.
It is only the treads or wheels what keep the vehicle from bottoming out and sticking where it is not moving or scraping the paint off the wall if it could.
Both designs rely on the friction between wheels (or treads) to be able to move; the tracks with their greater surface area will have more of that which goes to helping motion as commended and not sliding or slipping.
No, it results in pressure on the wheels. The treads are not pressed onto the wall except where they are wrapped round the wheels. Remember that the tracks are flexible. When the robot is climbing the wall even the weight of the treads is not pressing them onto the wall
I agree that there may be more friction but I suspect that it will have marginal effect
All other things being equal, which is probably not true anyway, the major factor as to whether the robot is able to hang on the wall and move is probably the coefficient of friction between the tyres and the wall
That being the case, the OP needs to concentrate on that component. The picture shows wheels with a tread pattern. Change to a completely smooth tire surface. Next change the material to a soft foam material. Tell us the results.
A free-body diagram shows that the major factors are:
suction force (which may be increased by a more powerful fan, smaller gap between wall and skirt, and larger "sucked" area)
weight (which may be reduced by judicious choice of materials)
coefficient of friction between the wheels and wall (which also may be increased by judicious choice of materials; and note that for practical purposes, the friction force is not a function of contact area)
perpendicular distance from the c.g. to the wall (counterintuitively, the larger this distance, the better, up to a point, since it "directs" more of the suction force to the lower driving wheels)
wheelbase (and likewise the smaller this distance, the better, to a point...)
Edit to update suction force line item, as suggested by @build_1971, 2nd to delete quote...
Add to this list the surface of the sucked area...
If you make this twice as large, you will have twice the force (at the same vacuum pressure).
If it gets twice as large, the length of the rims will slso increase. So more are needs to be moved to get to the same vacuum.
For a square, the length of the rims will increase less fast than the area.
Rims = 4xL
Area = L×L