Hi everybody,
Sorry my english not good,
I'm a robot enthusiast and I want to create bipedal robots.
I want to create a robot that is 1.65m tall and weighs 65kg.
I am not specialized in this field,
Through research and research, I chose to use stepper motors, driver , and use arduino serial connection and linux mini pc to control
Ignoring the code on the mini pc, I want to ask about whether the hardware principle to control the engine is okay?
Mini pc -> usb switch -> arduino nano-> driver -> stepper motor (1 arduino control 1-2 motor)
Arduino -> as5600 like encoder (pid control)
Arduino -> mpu 6050
- I want to ask if hardware like this can be used build a bipedal robot like a humand, there are problems with the motor control, such as feedbackfrom the sensor, latency, accuracy ... ?
- I see humanoid robot lola they use ether cat connection, not use usb
Currently, I only do the hardware and mechanical design. After completing, I install the programming and control circuit - I have a problem I don't know how to handle
that is the position of the motor during the power failure
With encoder and home button, it is possible to count and know motor position
but when the power is lose and the motor is moved, for example when the robot is standing when power is on, and then the power off, the robot falls down, the motor position will change, how i know when the power is restored, i know the position of motor, to calculate the number of steps the motor will need to move
I know my project may not be complete
because it's quite difficult
But I love it, I love the process of learning and testing new things
Thank you for your help
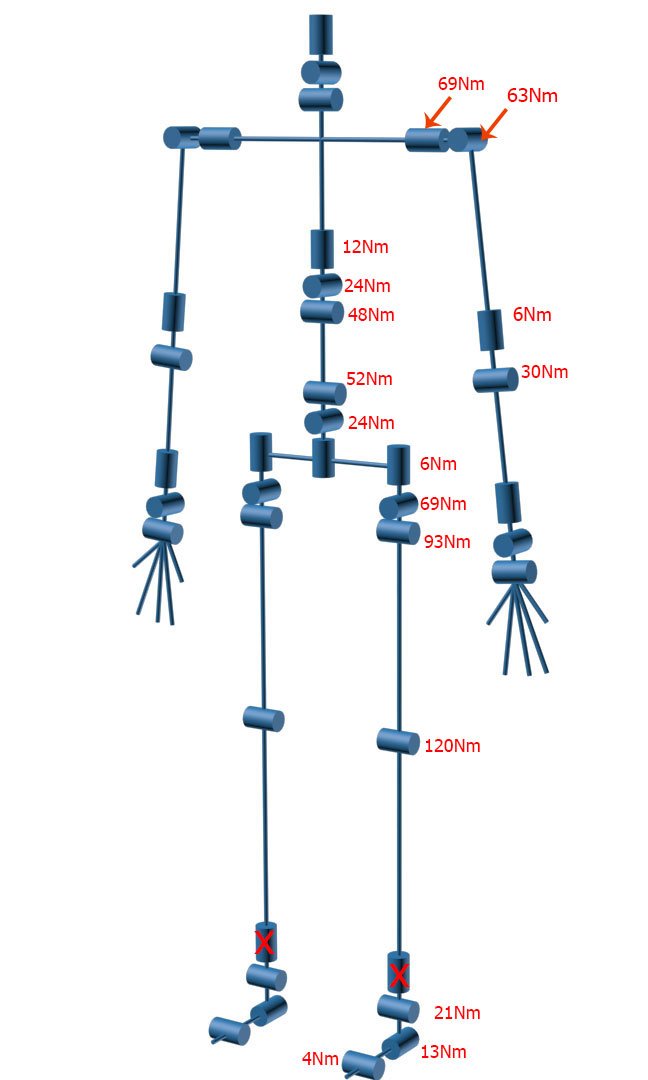
this picture is my design, all motor are inside the body