The following sketch is based on the JJRobots Brobot source for use with their Devia board that includes an ESP8266 chip. It is supposed to open a UPD port and allow for sending and receiving UDP data using ports 2223 and 2222. It was designed to work with TouchOSC on an iPhone or android.
What I provide here is pared down to just what is needed for the communications. So far, I haven’t been able to prove that it sends or receives.
It can be a standalone server or connected to an existing network. In standalone mode, you connect to the server and the connections are:
#define WIFI_IP "192.168.1.101” // Force Server IP
#define TELEMETRY "192.168.1.38" // Telemetry server port 2223
When connected to a network, the connections are:
#define TELEMETRY "192.168.4.2" // Default telemetry server (first client) port 2223
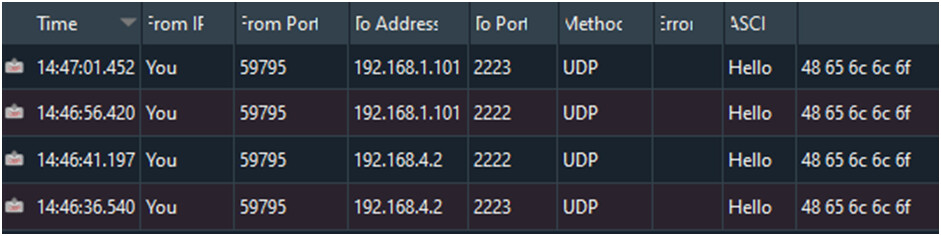
I am using “Packet Sender” to send "Hello" in a UDP packet.
In network connection mode, I sent a packet to 192.168.1.38 and 192.168.1.101 ports 2223 and 2222. Nothing showed up on the Serial Monitor

In standalone server mode, I sent packets to 192.168.4.2 and 192.168.1.101 ports 2223 and 2222. No luck.
Let me state that I know almost nothing about UDP communications. The Packet server is something I found when Googling “monitor UDP Packets”.
Not sure what is wrong. It may be as simple as the way I am trying to read/write in the loop().
Two questions:
- Why doesn’t the sketch display the packets that it is sent?
- Is Packet Sender a good tool to use for monitoring the UDP packets? It seems to send packets but it has never shown an incoming packet.
Added info on 11/15/2023
The Devia shield is on an Arduino Leonardo. The following is the Serial Monitor display when the sketch starts. The series of errors are NEW this morning.
I think the Devia board is just too much trouble. I am going to switch to the Arduino R4 Wifi.
UDP Server test
WIFI initERROR
ERROR
52ERROR
4ERROR
79ERROR
79ERROAT
OK
!Timeout!
AT+RSTOK
ets Jan 8 2013,rst cause:2, boot mode:(3,6)
load 0x401sl⸮⸮rl⸮⸮
Ai-Thinker Technology Co.,Ltd.ready
!Timeout!
AT+CIPSTAMAC?+CIPSTAMAC:"18:fe:34:df:00:64"
OK
AT+CWQAP
OK
AT+CWMODE=2
OK
AT+CWSAP="UDP_TEST_64","87654321",5,3
OK
Start UDP serverAT+CIPMUX=0
OK
AT+CIPMODE=1
OK
AT+CIPSTART="UDP","192.168.4.2",2223,2222,0
CONNECT
OK
Server Started
Here are the files:
UDPTest.ino
// BROBOT EVO 2 by JJROBOTS
// SELF BALANCE ARDUINO ROBOT WITH STEPPER MOTORS
// License: GPL v2
// OSC functions (OSC = Open Sound Control protocol)
#include "secrets.h"
#include <Wire.h>
#define OSCDEBUG1
#define OSCDEBUG2
#define OSCDEBUG3
// Uncomment this lines to connect to an external Wifi router (join an existing Wifi network)
//#define EXTERNAL_WIFI
//#define WIFI_IP "192.168.1.101" // Force ROBOT IP
//#define TELEMETRY "192.168.1.38" // Telemetry server port 2223
#define TELEMETRY "192.168.4.2" // Default telemetry server (first client) port 2223
String MAC; // MAC address of Wifi module
bool newControlParameters = false;
bool modifing_control_parameters = false;
// OSC output variables
uint8_t OSCpage;
uint8_t OSCnewMessage;
float OSCfader[4];
float OSCxy1_x;
float OSCxy1_y;
float OSCxy2_x;
float OSCxy2_y;
uint8_t OSCpush[4];
uint8_t OSCtoggle[4];
uint8_t OSCmove_mode;
int16_t OSCmove_speed;
int16_t OSCmove_steps1;
int16_t OSCmove_steps2;
// INITIALIZATION
void setup()
{
Serial.begin(115200); // Serial output to console
delay(1000);
Serial1.begin(115200);
delay(1000);
Serial.println("UDP Server test");
// With the new ESP8266 WIFI MODULE WE NEED TO MAKE AN INITIALIZATION PROCESS
Serial.println("WIFI init");
Serial1.flush();
Serial1.print("+++"); // To ensure we exit the transparent transmision mode
delay(100);
ESPsendCommand("AT", "OK", 1);
ESPsendCommand("AT+RST", "OK", 2); // ESP Wifi module RESET
ESPwait("ready", 6);
ESPsendCommand("AT+GMR", "OK", 5);
#ifdef EXTERNAL_WIFI
ESPsendCommand("AT+CWQAP", "OK", 3);
ESPsendCommand("AT+CWMODE=1", "OK", 3);
//String auxCommand = (String)"AT+CWJAP="+WIFI_SSID+","+WIFI_PASSWORD;
char auxCommand[90] = "AT+CWJAP=\"";
strcat(auxCommand, WIFI_SSID);
strcat(auxCommand, "\",\"");
strcat(auxCommand, WIFI_PASSWORD);
strcat(auxCommand, "\"");
ESPsendCommand(auxCommand, "OK", 14);
#ifdef WIFI_IP
strcpy(auxCommand, "AT+CIPSTA=\"");
strcat(auxCommand, WIFI_IP);
strcat(auxCommand, "\"");
ESPsendCommand(auxCommand, "OK", 4);
#endif
ESPsendCommand("AT+CIPSTA?", "OK", 4);
#else // Deafault : we generate a wifi network
Serial1.println("AT+CIPSTAMAC?");
ESPgetMac();
//Serial.print("MAC:");
//Serial.println(MAC);
delay(200);
ESPsendCommand("AT+CWQAP", "OK", 3);
ESPsendCommand("AT+CWMODE=2", "OK", 3); // Soft AP mode
// Generate Soft AP. SSID=UDP_TEST, PASS=87654321
char *cmd = "AT+CWSAP=\"UDP_TEST_XX\",\"87654321\",5,3";
// Update XX characters with MAC address (last 2 characters)
cmd[19] = MAC[10];
cmd[20] = MAC[11];
ESPsendCommand(cmd, "OK", 6);
#endif
// Start UDP SERVER on port 2222, telemetry port 2223
Serial.println("Start UDP server");
ESPsendCommand("AT+CIPMUX=0", "OK", 3); // Single connection mode
ESPsendCommand("AT+CIPMODE=1", "OK", 3); // Transparent mode
char Telemetry[80];
strcpy(Telemetry,"AT+CIPSTART=\"UDP\",\"");
strcat(Telemetry,TELEMETRY);
strcat(Telemetry,"\",2223,2222,0");
ESPsendCommand(Telemetry, "OK", 3);
Serial.println("\nServer Started");
}
int incomingByte = 0;
void loop() {
Serial1.print("Hello");
delay(1000);
}Network.ino
// BROBOT EVO 2 by JJROBOTS
// SELF BALANCE ARDUINO ROBOT WITH STEPPER MOTORS
// License: GPL v2
// OSC functions (OSC = Open Sound Control protocol)
void readControlParameters()
{
// Parameters Mode (page2 controls)
// Parameter initialization (first time we enter page2)
if (!modifing_control_parameters)
{
for (uint8_t i = 0; i < 4; i++)
OSCfader[i] = 0.5;
OSCtoggle[0] = 0;
modifing_control_parameters = true;
Serial1.println("$P2");
}
}
int ESPwait(String stopstr, int timeout_secs)
{
String response;
bool found = false;
char c;
long timer_init;
long timer;
timer_init = millis();
while (!found) {
timer = millis();
if (((timer - timer_init) / 1000) > timeout_secs) { // Timeout?
Serial.println("!Timeout!");
return 0; // timeout
}
if (Serial1.available()) {
c = Serial1.read();
Serial.print(c);
response += c;
if (response.endsWith(stopstr)) {
found = true;
delay(10);
Serial1.flush();
Serial.println();
}
}
}
return 1;
}
// getMacAddress from ESP wifi module
int ESPgetMac()
{
char c1, c2;
bool timeout = false;
long timer_init;
long timer;
uint8_t state = 0;
uint8_t index = 0;
MAC = "";
timer_init = millis();
while (!timeout) {
timer = millis();
if (((timer - timer_init) / 1000) > 5) // Timeout?
timeout = true;
if (Serial1.available()) {
c2 = c1;
c1 = Serial1.read();
Serial.print(c1);
switch (state) {
case 0:
if (c1 == ':')
state = 1;
break;
case 1:
if (c1 == '\r') {
MAC.toUpperCase();
state = 2;
}
else {
if ((c1 != '"') && (c1 != ':'))
MAC += c1; // Uppercase
}
break;
case 2:
if ((c2 == 'O') && (c1 == 'K')) {
Serial.println();
Serial1.flush();
return 1; // Ok
}
break;
}
}
}
Serial.println("!Timeout!");
Serial1.flush();
return -1; // timeout
}
int ESPsendCommand(char *command, String stopstr, int timeout_secs)
{
Serial1.println(command);
ESPwait(stopstr, timeout_secs);
delay(250);
}Secrets.h
#define WIFI_SSID "xxxx"
#define WIFI_PASSWORD "xxxx"