Hi there Arduino Community!
I have been very busy with this project but i have been stuck on this part for a little while now, i just need to be able to read 1 simple holding register from my Modbus slave device and i will be able to continue.
I have a MAX485 to TTL module hooked up between the Arduino Mega and the Modbus slave.
i have read many and many different forum posts and watched loads of youtube videos but none of them really seem to work. ill provide as much info as i can so hopefully someone can help me out.
So the Slave i am trying to connect to is a regulator that collects data from temperature sensors. i want the Arduino to read the data that is collected by the regulator so i can confirm that the regulator is doing the correct things it should do.
Using the code as shown here i noticed that only the RX light seems to be flashing and not the Tx light. so i am assuming there is no request being sent out to the slave and thus nothing can be received.
#include <ModbusMaster.h>
#include <SoftwareSerial.h>
#define MAX485_DE_RE 3 // DE (Data Enable) and RE (Receive Enable) control pins
SoftwareSerial modbusSerial(8, 9); // SoftwareSerial on pins 8 (RX) and 9 (TX)
ModbusMaster node;
void setup() {
Serial.begin(9600); // Start serial communication for debugging
modbusSerial.begin(19200); // Start SoftwareSerial with a baud rate of 19200
node.begin(17, modbusSerial); // Initialize Modbus with slave address 17 and use SoftwareSerial
node.setTransmitBuffer(0, 0x00C9); // Set the data to send (Holding register address 0x00C9)
pinMode(MAX485_DE_RE, OUTPUT); // Set the DE/RE pin as an output
digitalWrite(MAX485_DE_RE, LOW); // Set DE/RE to LOW (Receive mode for MAX485)
}
void loop() {
uint8_t result;
// Switch to transmit mode
digitalWrite(MAX485_DE_RE, HIGH);
// Send the request to read the holding register from the slave
result = node.readHoldingRegisters(0, 1); // Read one register starting at address 0x0064
// Switch back to receive mode
digitalWrite(MAX485_DE_RE, LOW);
// Check if the read was successful
if (result == node.ku8MBSuccess) {
// Get the value from the response
int temperature = node.getResponseBuffer(0);
// Print the temperature value to the serial monitor
Serial.print("Temperature (Celsius): ");
Serial.println(temperature);
// You can now use the 'temperature' variable for further processing
} else {
// Print an error message with the associated error code
Serial.print("Error reading register. Error code: 0x");
Serial.println(result, HEX);
// Print an error message based on the error code
switch (result) {
case ModbusMaster::ku8MBInvalidSlaveID:
Serial.println("Invalid slave ID");
break;
case ModbusMaster::ku8MBInvalidFunction:
Serial.println("Invalid Modbus function");
break;
case ModbusMaster::ku8MBResponseTimedOut:
Serial.println("Response timed out");
break;
case ModbusMaster::ku8MBInvalidCRC:
Serial.println("Invalid CRC");
break;
default:
Serial.println("Unknown error");
break;
}
}
delay(1000); // Wait for 1 second before the next read
}

Here we can see the Modbus specifications for the device i am trying to request that piece of data from.
this is the holding register i am trying to read. : 00C9
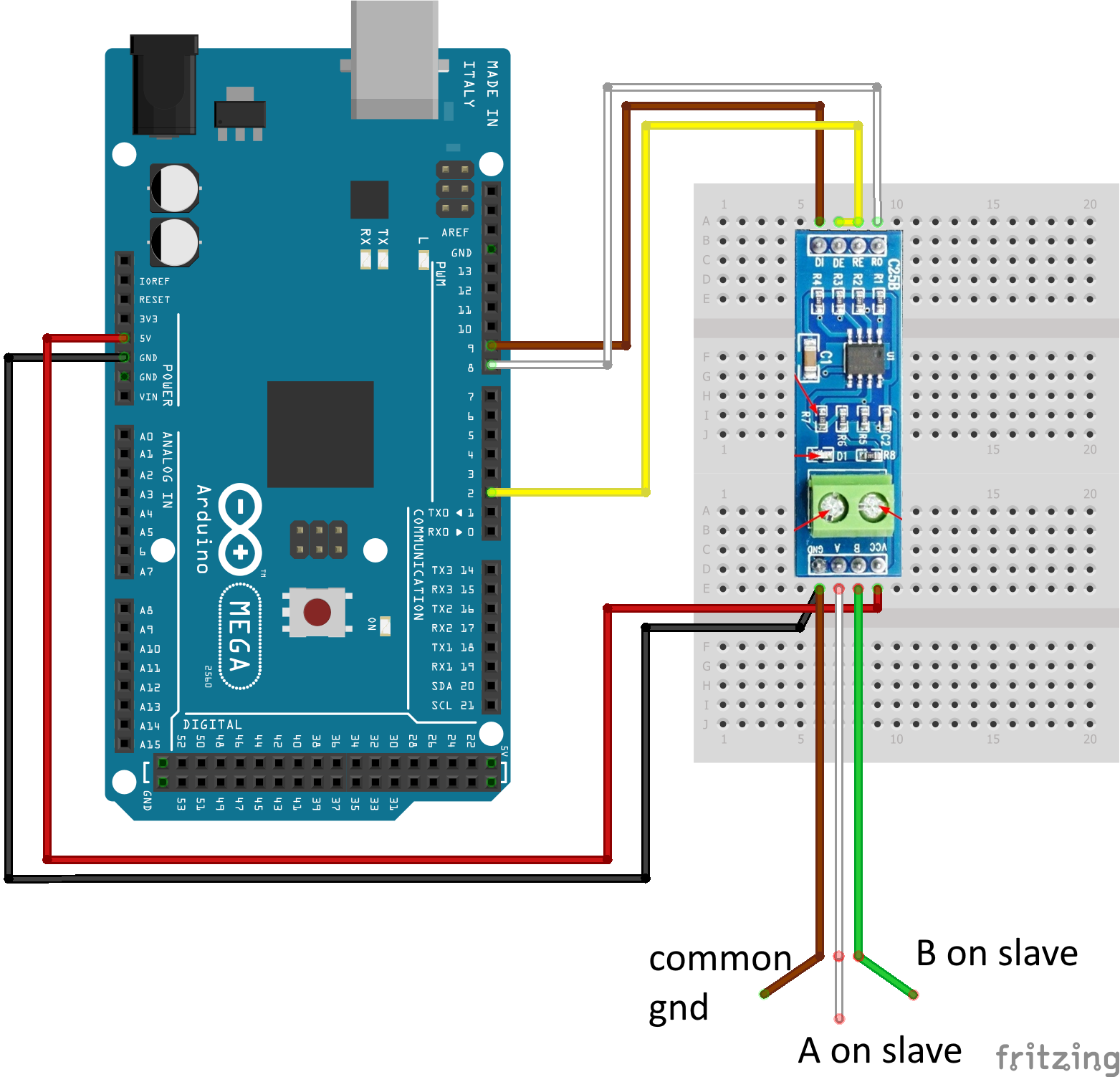
This is the exact wiring of how i have it set up right now.
As you can see i have a little piece of code that show what error is making node.ku8MBSuccess Fail.
this is the output i am getting from the serial monitor.

I really hope i have provided enough information. if someone has any clue of what is going on here don't hesitate to respond to this thread ![]()




