Hello everyone,
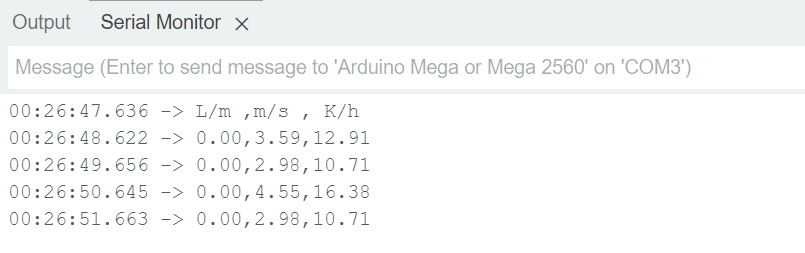
I'm hoping you can help me with a problem I'm having with my Arduino project. I'm trying to log data from different sensors, like thermocouples, Ds18B20, DHT22, flow meters, and wind speed meters..... etc. I'm using an Arduino Mega as the controller. The issue is that I can't get the flow meter and the wind speed meter to work together with interrupts. When I use both interrupts, only the wind speed sensor gives me readings, the flow sensor doesn't. But when I test each sensor separately, they both work fine. I don't know what's causing this problem. I've looked online for some answers, but nothing seems to work. Do you have any suggestions on how to fix this code?
Thanks in advance.
//Wind Sensor Code in meter per second(m/s). (Connect VCC to brown wire and GND to black wire)
#define READ_TIME 1000 //ms
#define WIND_SENSOR_PIN 3 //wind sensor pin (BLUE WIRE)
#define WIND_SPEED_20_PULSE_SECOND 1.75 //in m/s this value depend on the sensor type
#define ONE_ROTATION_SENSOR 20.0
volatile unsigned long Rotations; //Cup rotation counter used in interrupt routine
float WindSpeed; //Speed meter per second
float WindSpeedKh; //Speed kilometer per hour
unsigned long gulStart_Read_Timer = 0;
//liquid/water flow meter in litre per minute(L/m). (Connect VCC to red wire and GND to black wire)
byte sensorInterrupt = 0; // 0 = digital pin 2
byte sensorPin = 2; //signal line(yellow) to arduino digital pin 2.
float calibrationFactor = 7.5; // The hall-effect flow sensor outputs approximately 7.5 pulses per second per litre/minute of flow.
volatile byte pulseCount;
float flowRate;
unsigned long oldTime;
unsigned int flowMilliLitres;
unsigned long totalMilliLitres;
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
// Wind sensor
pinMode(WIND_SENSOR_PIN,INPUT_PULLUP);
attachInterrupt(digitalPinToInterrupt(WIND_SENSOR_PIN),isr_rotation, CHANGE); //Set up the interrupt
sei(); //Enables interrupts
gulStart_Read_Timer - millis();
// flow metre
pinMode(sensorPin, INPUT);
digitalWrite(sensorPin, HIGH);
pulseCount = 0;
flowRate = 0.0;
oldTime = 0;
attachInterrupt(sensorInterrupt, pulseCounter, FALLING);
Serial.println("L/m ,m/s , K/h");
}
void loop() {
// wind sensor
if((millis() - gulStart_Read_Timer) >= READ_TIME)
{
cli(); //Disable interrupts
//convert rotation to wind speed in m/s
WindSpeed = WIND_SPEED_20_PULSE_SECOND/ONE_ROTATION_SENSOR*(float)Rotations;
WindSpeedKh=WindSpeed*3.6;
sei(); //Enables interrupts
Rotations = 0; //Set Rotations count to 0 ready for calculations
gulStart_Read_Timer = millis();
}
// flow sensor
if((millis() - oldTime) > 1000) // Only process counters once per second
{
detachInterrupt(sensorInterrupt); // Disable the interrupt while calculating flow rate and sending the value to the host
/*
Because this loop may not complete in exactly 1 second intervals we calculate the number of milliseconds
that have passed since the last execution and use that to scale the output. We also apply the calibrationFactor
to scale the output based on the number of pulses per second per units of measure (litres/minute in this case) coming from the sensor.
*/
flowRate = ((1000.0 / (millis() - oldTime)) * pulseCount) / calibrationFactor;
/*
Note the time this processing pass was executed. Note that because we've disabled interrupts the millis() function won't
actually be incrementing right at this point, but it will still return the value it was set to just before interrupts went away.
*/
oldTime = millis();
/*
Divide the flow rate in litres/minute by 60 to determine how many litres have passed through the sensor
in this 1 second interval, then multiply by 1000 to convert to millilitres.
*/
flowMilliLitres = (flowRate / 60) * 1000;
totalMilliLitres += flowMilliLitres; // Add the millilitres passed in this second to the cumulative total
unsigned int frac;
Serial.print(flowRate);
Serial.print(",");
Serial.print(WindSpeed);
Serial.print(",");
Serial.println(WindSpeedKh);
delay(1000);
}
}
// Increment the pulse counter
void pulseCounter()
{
pulseCount++;
}
// This is the function that the interrupt calls to increment the rotation count
void isr_rotation()
{
Rotations++;
}