Hello i am trying to build the following model:

I have differences with the parts i got. The ping sensor in the project is with 3 pins and the one i have is with 4 ( Echo and triger signals)
What should i change in the code to make it work ?
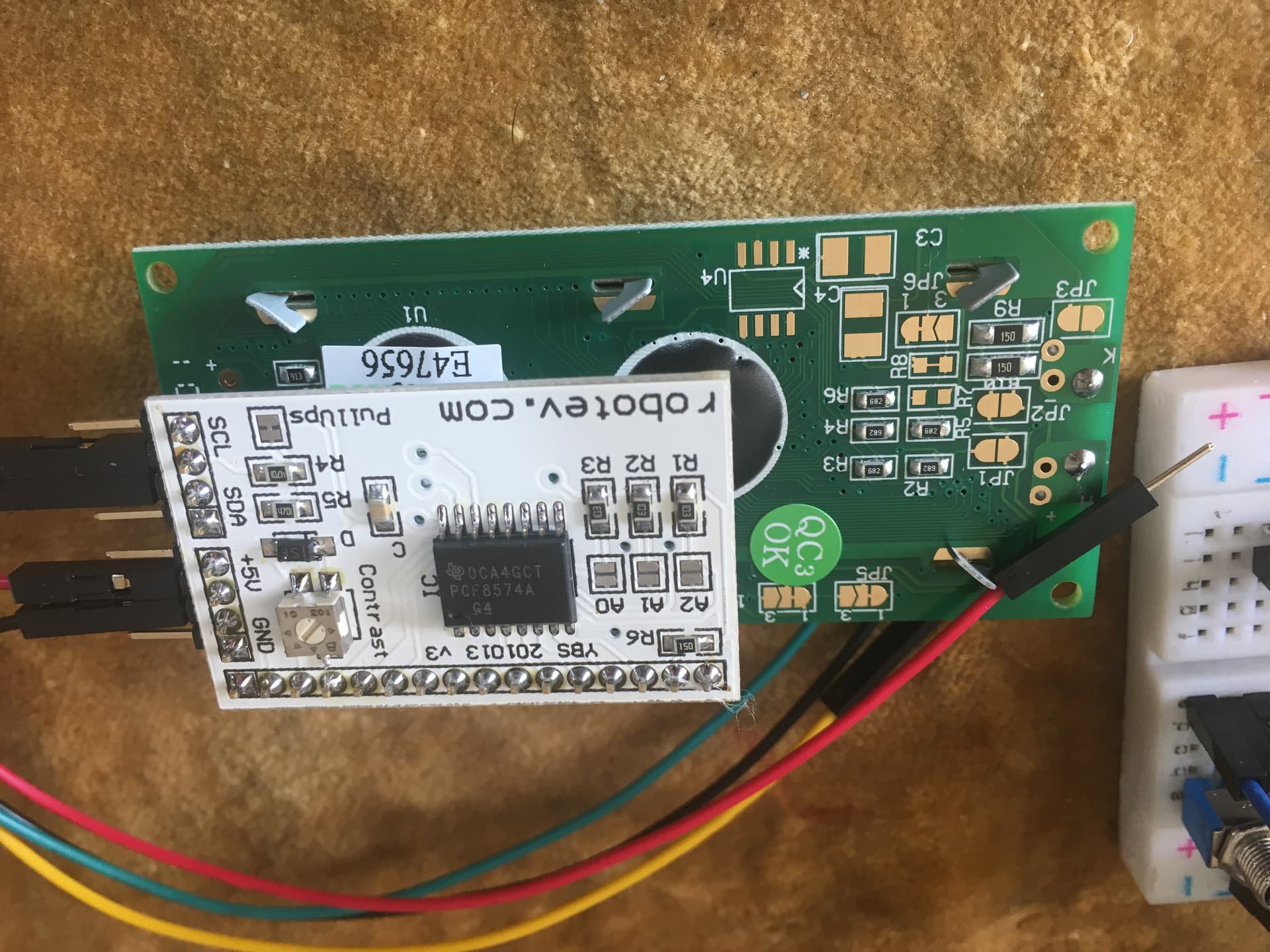
Also i have difference LCD display than the one showed in the project. It have SCA/ SDL outputs. If i connect them with the corresponding pins on the arduino board SCA/SDL will it work with the same code or i need to change it and if yes could you advice me what to read to do so ?
code
/* Code for Adaptive Cruise Control System(ACC)*/
// Including Library Files:
#include <LiquidCrystal.h>
#include<Servo.h>
/* Macro Definition */
#define massSensor A0
#define cruiseSpeedDial A2
#define cruiseDistanceDial A3
/* Object Declaration */
Servo myservo1,myservo2;
LiquidCrystal lcd(12, 5, 4, 2, 1, 0);
/* Global Variables Declaration*/
const int pingPin=7; //Pin connected to the Ultrasonic Sensor
const int servo1=9; //Pin connected to the Throttle Servo
const int servo2=10; //Pin connected to the Brake Servo
const int start=8; //Pin connected to the ACC Master Control Switch
const int engineRPM=11; //Pin connected to the Motor
const int speedSensor=3; //Pin connected to Simulated Car Speed Sensor
int distance=0; //Variable to store the distance of the leading vehicle from the host vehicle
int distanceSet=0; //Variable to store the minimum distance set by the user, that is to be maintained in ACC mode
int speed=0; //Variable to store the speed of the Host vehicle
int speedSet=0; //Variable to store the cruise speed from the user
int tempSpeedSet=0; //Variable to store temporary speed value
int mass=0; //Variable to store the total mass of the vehicle including passengers
int servoValue=0; //Variable to store angle values of servos
long duration=0; //Variable to store the Pulse Duration in Radar
double error=0; //Variable to store error in speed
double lastError=0; //Variable to store the last error in speed
double cumError=0; //Variable to store the cummulative error over time
double rateError=0; //Variable to store the change of rate of error over time
double outputPWM=0; //Final Output to be given to the Motors
double kp=15; //Variable to store the Propotional Gain
double ki=1; //Variable to store the Integral Gain
double kd=0.5; //Variable to store the Derivative Gain
double force=0; //Variable to store the overall force acting on the simulated car
double friction=0; //Variable to store the frictional force acted upon the car
double drag=0; //Variable to store the drag force acted upon the car
int brakeForce=0; //Variable to store the BreakForce needed to stop the car
double acceleration=0; //Variable to store the acceleration of the car
/* Function Prototypes*/
void defaultPos(void); //Function that runs when system is Off
void startACC(void); //Function that runs when system is On
void getDistance(void); //Function to set the minimum allowed trailing distance from the user
void getSpeed(void); //Function to set the cruise speed from the user
void checkRadar(void); //Function to get vehicle position at front
void getMass(void); //Function to get the vehicle and passenger Mass
void getSimulatedSpeed(void); //Function to get the Simulated vehicle speed
void PID(void); //Function to Control the PWM output using PID Control Algorithm
void simulateCar(void); //Function to simulate the linear movement of a car
void cutSpeed(void); //Function to reduce vehicle speed due to incoming traffic
void brake(void); //Function to calculate brake force to stop the vehicle
/* Function Definitions*/
void setup()
{
// Serial.begin(9600);
lcd.begin(16, 2);
pinMode(cruiseSpeedDial,INPUT);
pinMode(cruiseDistanceDial,INPUT);
pinMode(speedSensor,INPUT);
pinMode(start,INPUT);
pinMode(engineRPM,OUTPUT);
myservo1.attach(9);
myservo2.attach(10);
myservo1.write(90);
delay(15);
myservo2.write(90);
delay(15);
lcd.write("Adaptive Cruise");
lcd.setCursor(0,1);
lcd.write(" Control System");
delay(1500);
myservo1.write(0);
delay(15);
myservo2.write(0);
delay(15);
delay(1500);
lcd.clear();
}
void defaultPos(void)
{
lcd.setCursor(7,1);
lcd.write("OFF ");
lcd.setCursor(11,0);
lcd.print(speed);
lcd.write("Km ");
getSpeed();
getDistance();
checkRadar();
getMass();
}
void getDistance(void)
{
distanceSet = (analogRead(cruiseDistanceDial)*0.1953125)+100;
lcd.setCursor(0,1);
lcd.print(distanceSet);
lcd.print("m ");
}
void getSpeed(void)
{
speedSet = (analogRead(cruiseSpeedDial)*0.1171875)+30;
lcd.setCursor(0,0);
lcd.print(speedSet);
lcd.print("Km ");
}
void getMass(void)
{
mass = (analogRead(massSensor)*0.48828125)+1500;
lcd.setCursor(6,0);
lcd.print(mass);
}
void cutSpeed(void)
{
tempSpeedSet=speedSet-((300-distance)*0.003*speedSet);
if(speedSet!=tempSpeedSet)
speedSet=tempSpeedSet;
}
void brake(void)
{
brakeForce=(mass*((speed*speed)+1))/(2*distance);
outputPWM=0;
}
void PID(void)
{
error=speedSet-speed;
cumError+=error * 0.8; //0.8 is the simulation time
rateError=(error - lastError)/0.8;
outputPWM=(kp*error) + (ki*cumError) + (kd*rateError);
lastError=error;
analogWrite(engineRPM,outputPWM);
}
void simulateCar(void)
{
friction=0.7*mass*9.8; //0.7 is the assumed coefficint of friction
drag=(0.3*1.225*(speed*speed)*4)/2; //03 is the assumed drag coefficient,
//1.225 is the assumed density of the car
//4 square metres is the assumed surface area
force=(outputPWM*78.125)-brakeForce-friction-drag;
acceleration=force/mass;
speed+=acceleration*0.8;
if(speed<0)
speed=0;
lcd.setCursor(11,0);
lcd.print(speed);
lcd.print("Km ");
servoValue=(outputPWM*0.703125);
myservo1.write(servoValue);
delay(15);
servoValue=brakeForce;
myservo2.write(servoValue);
}
void checkRadar(void)
{
pinMode(pingPin, OUTPUT);
digitalWrite(pingPin, LOW);
delayMicroseconds(2);
digitalWrite(pingPin, HIGH);
delayMicroseconds(5);
digitalWrite(pingPin, LOW);
pinMode(pingPin, INPUT);
duration = pulseIn(pingPin, HIGH);
// convert the time into a distance
distance = duration/29/2;
lcd.setCursor(11,1);
lcd.print(distance);
lcd.print("m ");
}
void startACC(void)
{
getSpeed();
getDistance();
getMass();
lcd.setCursor(7,1);
lcd.print("ON ");
checkRadar();
if(distance>=distanceSet)
{
brakeForce=0;
PID();
simulateCar();
}
else if((distance<distanceSet)&&(distance>=30))
{
brakeForce=0;
cutSpeed();
PID();
simulateCar();
}
else
{
brake();
brakeForce+=30;
simulateCar();
}
}
void loop()
{
if(digitalRead(start)==HIGH) //Checking for switch On
startACC();
else
defaultPos();
}