Good morning everyone,
I would like to know if anyone has any information on the calibration of this shield.
my big problem is that when i go to read eulerian angles the heading is very wrong
I already opened a forum post asking about the accuracy of the Nicla Sense and was told to calibrate the magnetometers.
my questions are:
- Is there a sketch to have a more or less precise calibration to be performed within your own code?
- theoretically the Eulerian angles are processed by the BNO055 MCU, where the data is filtered, corrected and processed. using the official Arduino library does this automatic calibration take place?
- Is it possible that all these algorithms inside the IMUs are just hot air in the end? I'm noticing that all IMUs have the same problem.
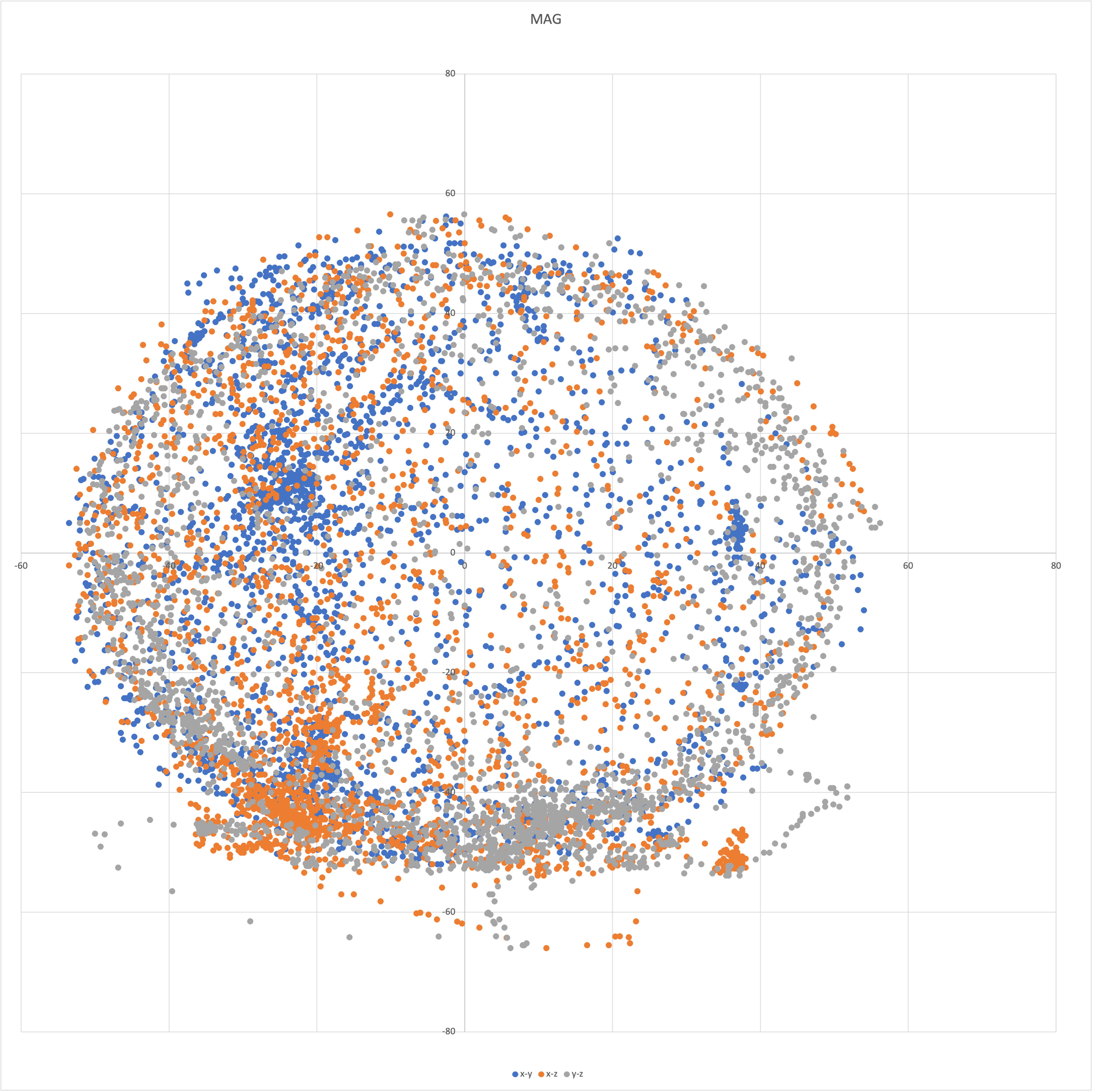
I am attaching the raw files of my magnetometer, I don't know if these are calibrated or not by the MCU.. I hope you can clarify