Hi,
I want to read some data from a pyranometer using Modbus, an arduino mega and a max485 converter (to create a rs485 grid, the complete proyect includes several pyranometer connected to the same port of the arduino).
I am using Modbusrtu.h library, but it doesn't seem to work correctly. I am able to transmits data, and the pyranometer responds as it should, but the function modbus.poll() doesn't receive anything. I know i am receiving things because i made a proof conecting the rx to a diferent serial port, and I read the response using Serial.read(). So, the error must be in the receiving part.
As I said, i can read the data from the pyranometer using serial.read(), but this solution is not valid to as i need in a further step to connect more than one pyranometer to the rs485, and i don't know how to manage the responses or controling the data without a library.
I've read this old Forum about the same subject, but it is closed and i don't fully understand the solution given there. What's the problem with the millis()? and how should i modify the library to solve the problem?
I put my code here (it is quite similar to the example code):
#include <ModbusRtu.h>
/**
Modbus object declaration
u8id : node id = 0 for master, = 1..247 for slave
u8serno : serial port (use 0 for Serial)
u8txenpin : 0 for RS-232 and USB-FTDI
or any pin number > 1 for RS-485
u8txenpin pin for txen RS-485 (=0 means USB/RS232C mode)
u8rxenpin pin for rxen RS-485 (=0 means USB/RS232C mode) NO EN ESTA LIBRERIA
*/
// Modbus(u8id, u8serno, u8txenpin, u8rxenpin);
Modbus master(0, 3, 22); //ID: 0 (master)
//Serial port: 3
//Enable pint : any (not use)
/**
This is an structe which contains a query to an slave device
*/
modbus_t telegram;
//-=-=-=-Variables ModBus-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=
uint16_t au16data[16];
uint8_t u8state; //!< machine state
uint8_t u8query; //!< pointer to message query
unsigned long u32wait;
//Variables globales
//-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=
float radiometro = 0;
//Variables de la respuesta
unsigned int respuesta[16]; //sin signo porque es como se recibe
unsigned int irradiancia_serie[4];
unsigned long int irradiancia; //32 bits sin signo
int n_mensaje;
void setup() {
Serial.begin(19200);
Serial1.begin(19200);
Serial2.begin(19200);
Serial3.begin(19200);
master.begin( 19200, SERIAL_8E1 ); // baud-rate at 19200
master.setTimeOut( 5000 ); // if there is no answer in 5000 ms, roll over
u32wait = millis() + 1000;
u8state = u8query = 0;
//ENVÍO DE TELEGRAMAS POR FIWARE
// telegram 0: read registers
telegram.u8id = 4; // slave address
telegram.u8fct = 3; // function code (this one is registers read)
telegram.u16RegAdd = 2; // start address in slave
telegram.u16CoilsNo = 2; // number of elements (coils or registers) to read
telegram.au16reg = au16data[0]; // pointer to a memory array in the Arduino
Serial.println("Estoy en el setup");
int ID;
ID = master.getID();
Serial.println( "ID del maestro (arduino): " + String(ID));
}
void loop() {
// put your main code here, to run repeatedly:
radiometro = leeRadiometro();
Serial.println("Radiometro " + String(radiometro));
delay(5);
}
float leeRadiometro() {
master.query( telegram ); // Envía la petición ModBus
u8state = 1;
n_mensaje=1;
do {
master.poll(); // Chequea la entrada de mensajes
if (master.getState() == COM_IDLE) {
u8state = 0;
u32wait = millis() + 1000;
Serial.println("mensaje leido completo ");
}
} while (u8state != 0);
for(int i=0; i<16; i++){
Serial.print("au16data" + String(i) + ": ");
Serial.println(au16data[i]);
}
smartdelay(100);
Serial.print("irradiancia (real): ");
Serial.println(radiometro);
Serial.println(String(radiometro));
Serial.println("**********************************");
return (radiometro);
}
static void smartdelay(unsigned long ms)
{
// Ubicamos el cursor en la primera posición(columna:0) de la segunda línea(fila:1)
unsigned long start = millis();
do
{
// Intentar recibir secuencia durante milisagundos ms
} while (millis() - start < ms);
}
And i am using this converter:
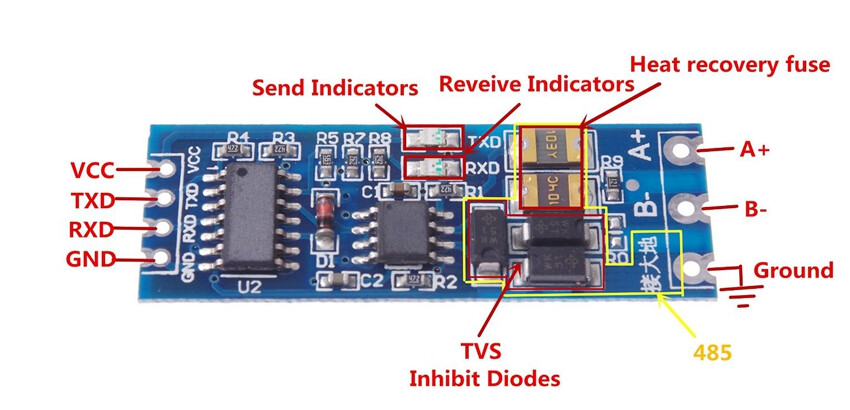
those are different to the usuals, this don't include a DE pin, but they admit half-duplex communication
I will appreciate any advice here,
Victoria