First of all, I really made progress with linear robot speed experiments, my caterpillar robot platform is able to run with 2.4m/s or 8.64km/h, which is half of my linear target speed. Her you can see that even U-turns can be done with high speed -- the back roll in the air at the end was not planned ![]()
Nevertheless I tested a new motor back in April and achieved a new speed record, only slightly better than reported here (with 5 LiPos and 20.8V):
")
Recently I stumbled over outrunner motors, and the pure sound made me think they would be able to achieve much more speed. After I broke many aluminum motor mounts due to vibrations I used self made wooden mounts:
http://forum.arduino.cc/index.php?topic=486004.0
I had to learn how to drive brushless motors with ESCs (Electronic Speed Control), how to deal with high currents (breadboard cables are not good for several amp and turn into smoke):

I use SimonK 30A ESCs, and have seen 4A with 10V running a single outrunner motor. Next I had to learn how to drive an ESC with Arduino. After many issues I did my last run 2 hours ago. This is 90fps slowmo video of that run:
")
At maximum speed it took 25 frames for 4 rounds of robot which means 0.415π4/(25/90)=18.77m/s or 67.59km/h or 42mph, new speed record.
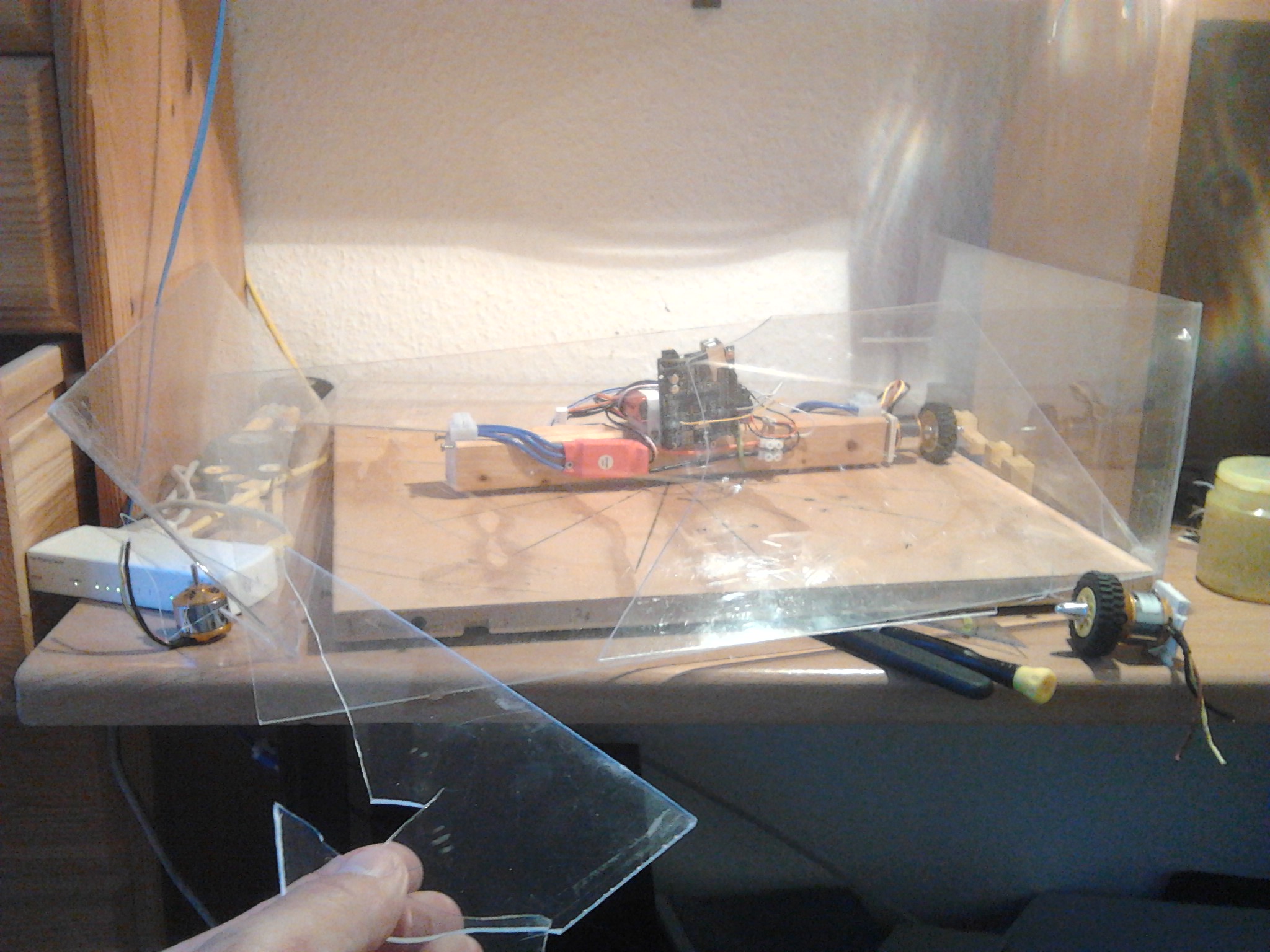
Here is the same run from Android phone camera so that you can hear what happened as well. At the end one motor plus wheel plus mounting bullet cut loose from the robot, and destroyed the surrounding safety glass:
")
Here you can see the broken safety glass, you can find the bullet (and motor) that broke it right outside of MTS:
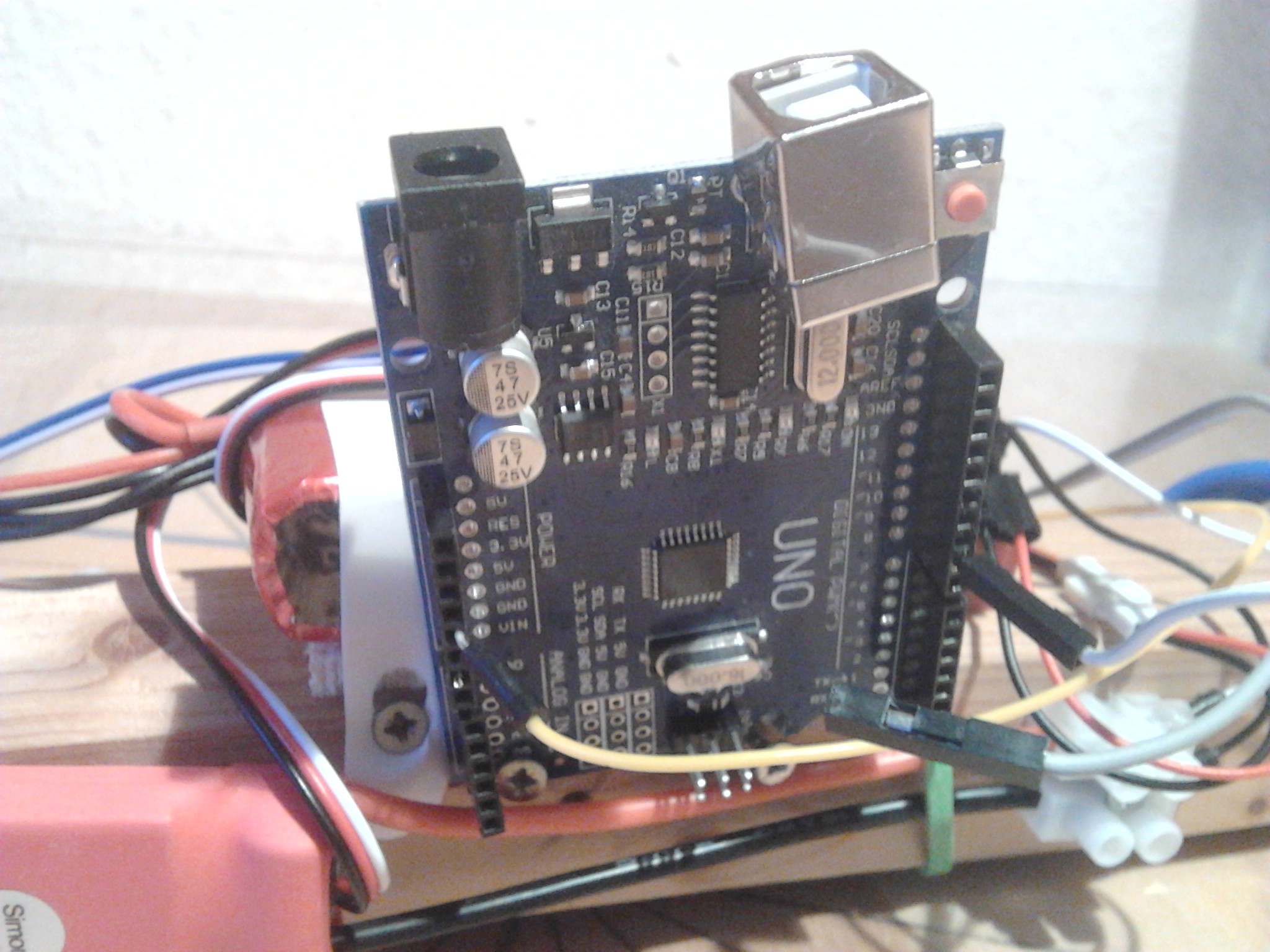
The USB connector or Arduino Uno got damaged as well. And the cable connected to Uno GND broke:
The wheel of the motor still connected to robot got loose and went further outside, so much that it should have hit the safety glass:

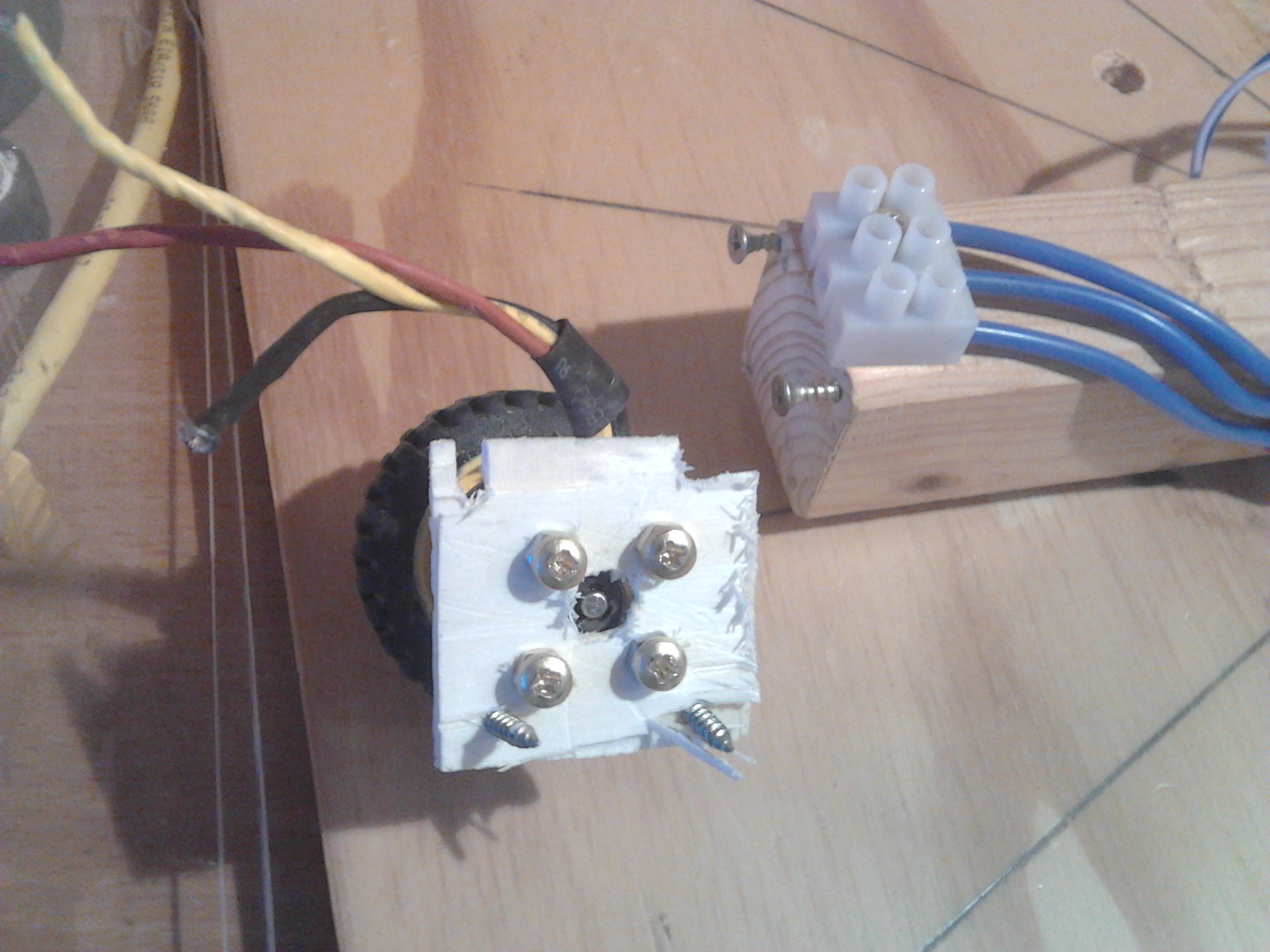
The wooden mount of the lost motor shows one of the problems, the holes for screws connecting to robot thick wooden beam did break:
So this run had good and bad, new speed record, and first time ever a wheel/motor that broke MTS safety glass surrounding.
Btw, the whole robot is of 495g weight!
The most interesting fact is that my ESC control range is [902μs,2127μs], and this run was done with "only" 1200μs ... I have no idea how much faster the robot might run with higher control values, this was just 25% of the possible range!
But any further experiments need a complete redesign of motor test station, safety glass does not help with the bullets used to mount wheel to motor. Motor mounts need to be much better (aluminum is no option, those just break). Need to find better wood. Need to reduce vibrations because of wheels not running perfectly balanced as well, And ...
Hermann.
P.S:
This is the sketch I used as is:
#include <Servo.h>
Servo ESC1;
void setup() {
int i;
ESC1.attach(9);
ESC1.writeMicroseconds(900);
for(i=901; i<=910; ++i) {
ESC1.writeMicroseconds(i);
delay(100);
}
delay(500);
for(i=1100; i<=1200; i+=10) {
ESC1.writeMicroseconds(i);
delay(100);
}
delay(5000);
ESC1.detach();
}
void loop() {
}
P.P.S:
Above run showed 18.77/(0.043*π)=139rps or 8340rpm at motor shaft.
A2212 2700KV outrunner motor with SimonK 30A ESC can do up to 30.000rpm:
P.P.P.S:
Motor+wheel+bullet (that flew away destroying safety glass) weight is 72g