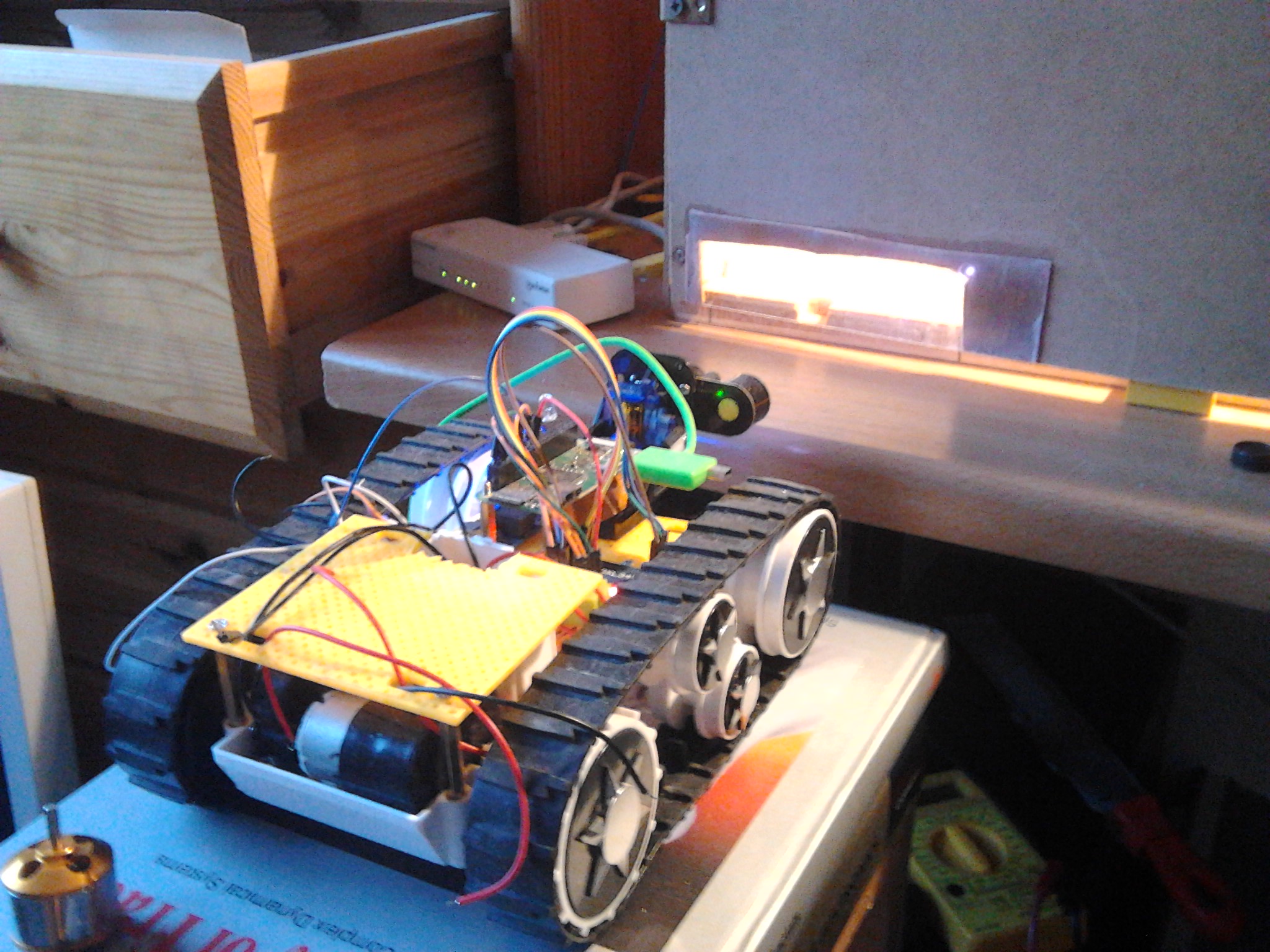
I did a further modification to MTS, added a peephole for third Raspberry NoIR camera to take horizontal video for bump analysis. More details in forum posting 1ms shutter speed 90fps slowmo dark – not with NoIR camera!

I started like most others with aluminum outrunner motor mounts, but with what I do I always break these:

Next step was to use self made mounts of wood, but they splittered:

Next was to use self made motor mounts from plastic, a really bad idea. At least the plastic I used was too brittle and quickly just broke:

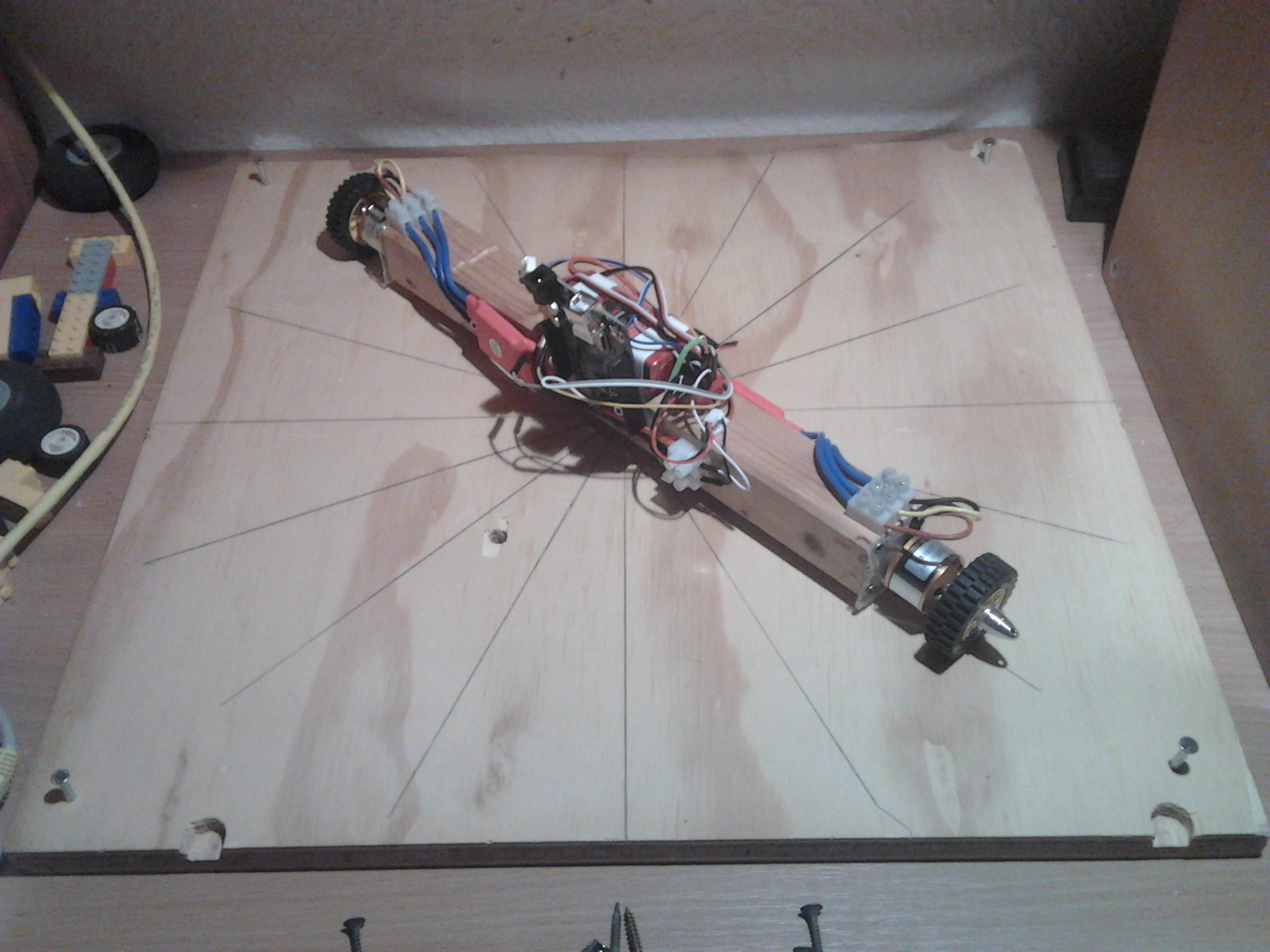
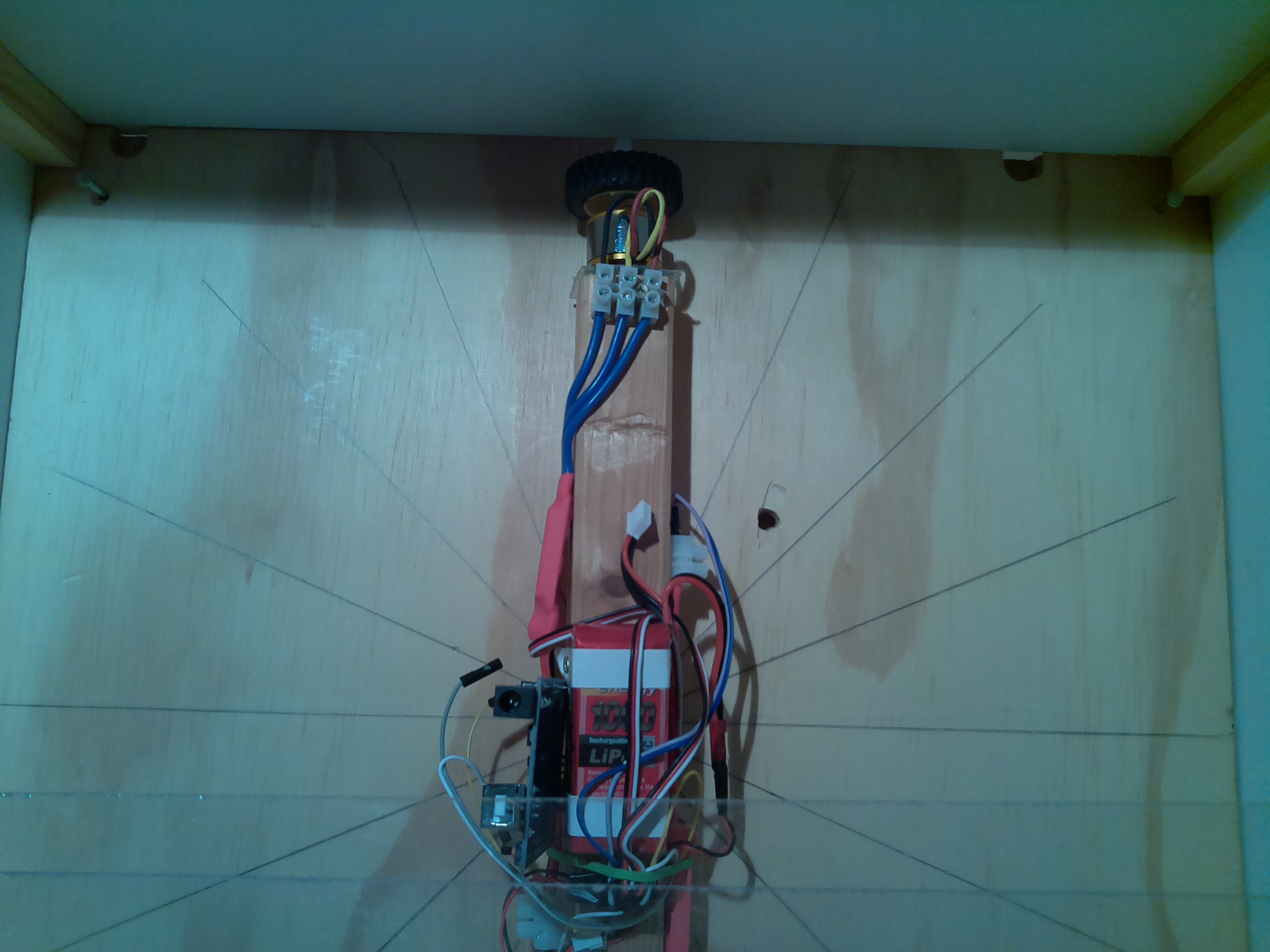
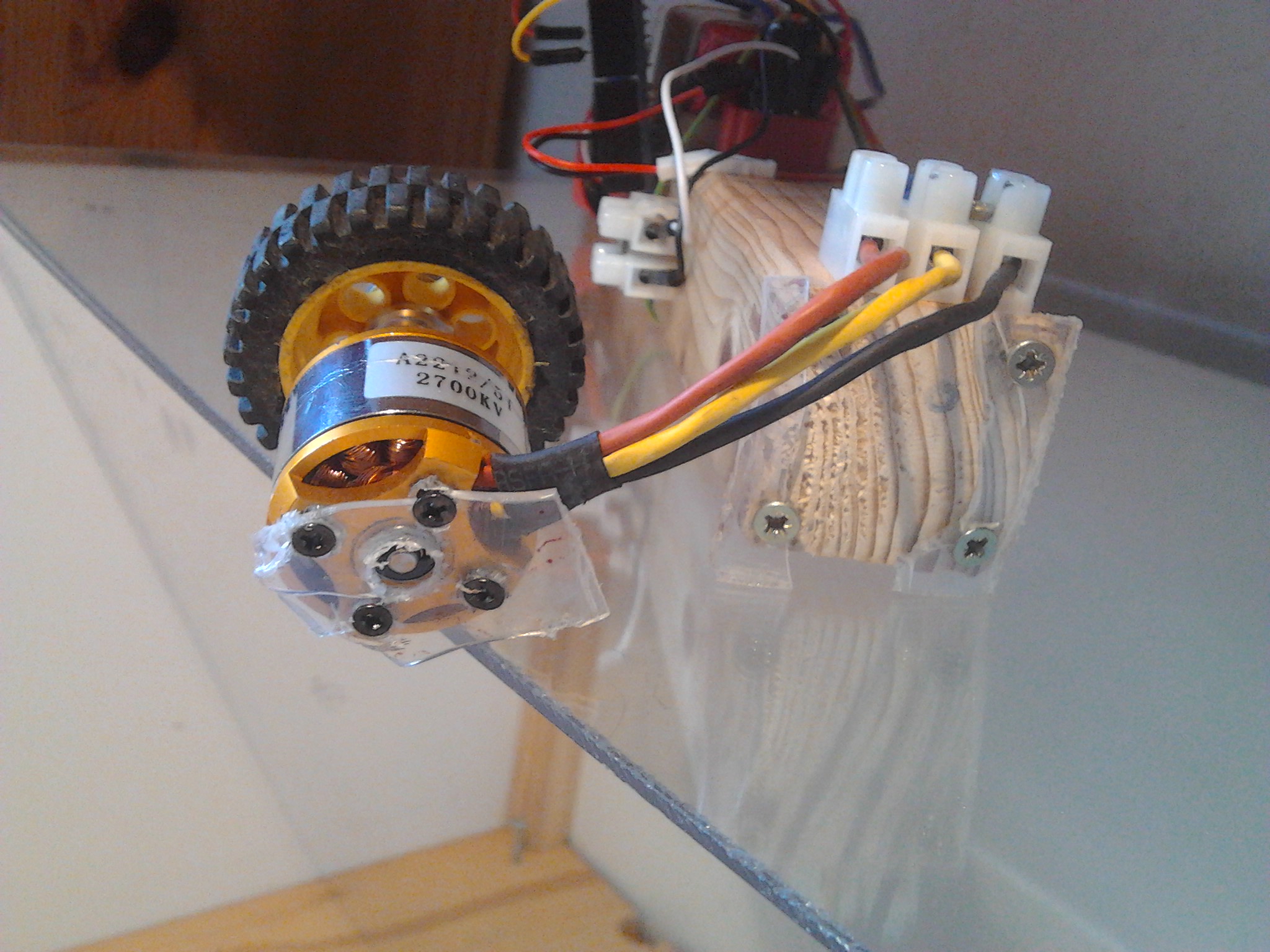
Next I tried to go back to my roots. Normally I do (nearly) everything with superglue, and so I did here as well, I superglued A2212 outrunner motor to beaverboard ...

... and then superglued beaverboard to robot wooden beam:

I had to cut a center hole into beaverboard because of the outrunner motor moving parts. In order to do minimal stress to beaverboard, I created the hole with soldering iron:

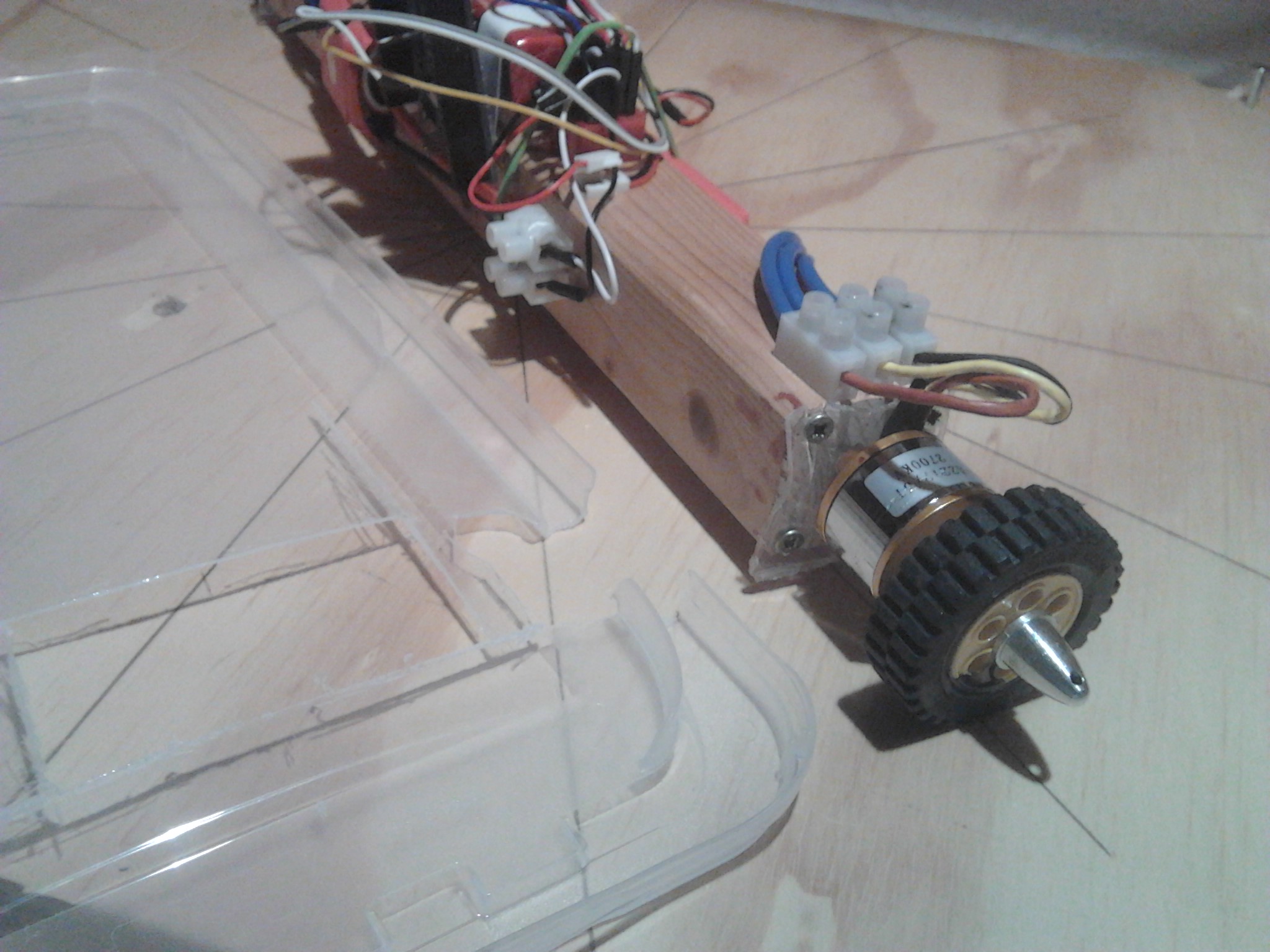
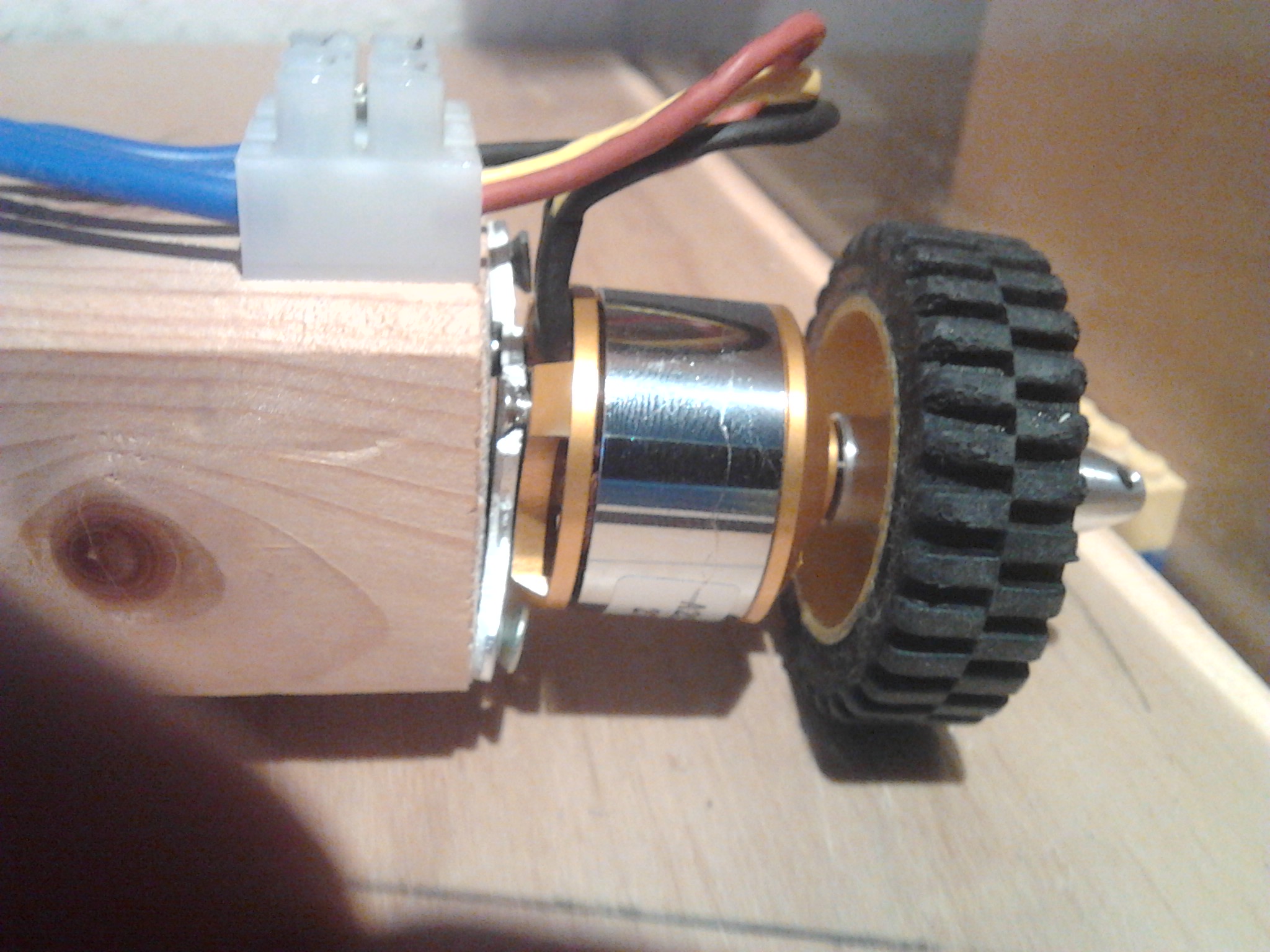
This is the final robot motor wheel connection:

I have already done many runs with the new superglued outrunner motors in motor test station, now its really reliably, and the robot ends a run as he did start, with all wheels and motors attached  My explanation for this is that the (metal) base area of A2212, even without the round center moving part is so big, that supergluing that whole area to beaverboard is much better than 4 screws:
My explanation for this is that the (metal) base area of A2212, even without the round center moving part is so big, that supergluing that whole area to beaverboard is much better than 4 screws:

Last, but not least, some 90fps slowmo video action
Click the animated .gifs to see in 640x480 size.
From peephole 90fps slowmo video: Robot starts with spinning wheels, bumpy, but goes smooth later. Animation is slowed down by factor of 10:
And a reminder to myself: "Don't forget safety glas cover on Motor Test Station!"
Wheel lost at 52km/h hits wall, then goes up out of MTS, near miss of top camera!!
(1 frame of 90fps slowmo video per second, slowdown factor 90)

Hermann.






")






