Please describe the order of the work up until now.
ok sorry, by mistake
(post deleted by author)
I had fixed sensor shield V5 on Arduino UNO, connected as per the diagram and also uploaded the code on Arduino
sorry sir, how can i delete it
Your words "it doesn't work" tells nothing. Dry reading code is a long time project, not possible here and now.
All in a long line?
That's the best way to end up with trouble.
Start by making code that runs only one item. Start with the remote. When that work add code for one more peripheral and make it work. And so on.
Disconnect the lot and uncomment code except for the remote.
Edit: How is the controller and sensors powered?
Click the flag and request administrator assistance to delete (of the thread you do not want)
Yes powered, ir reciever blinking when giving signals on remote but motors are not responding for it.
Ok sure
How?
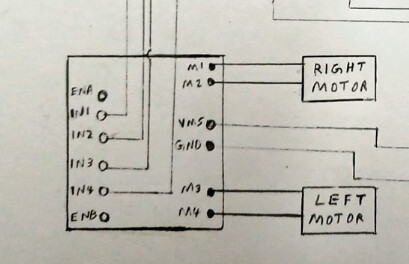
No connection to the ENA/ENB pins. Why?
I would learn how to control the engines first, then add the others.
PWM speed control must go from the PWM pin to ENA, ENB.
ENA and ENB are not connected; it is not mentioned in the code. To which pin do EN pins have to connect?
Can you please mention which pins it has to connect to?
2 Li-ion Batteries of 3.7 V are connected to the VMS and GNF of the motor driver and also powered from the battery to the Arduino power Jack. Sensors are connected to v and g of the digital pins, which have 5 volts of power.
The Vin needs 7.5 volt to work and produce 5 volt. Powering this way makes the 5 volt output very unsafe, uncertain. It doesn't deliver more current then for an LED or two.
So,what can I do now?
What do You think You want to change?
I suugets using an extra, external, 5 volt converter capable of running from the batteries You want.
A common usage is connecting the EN(able) pin to a PWM capable output to get variable speed control. If you just want on/off control wire EN to a digital output. Alternatively, you could wire EN to 5V through a pullup resistor and the motor control would be always on, that is, ENabled.
Ok, Thanks i will do