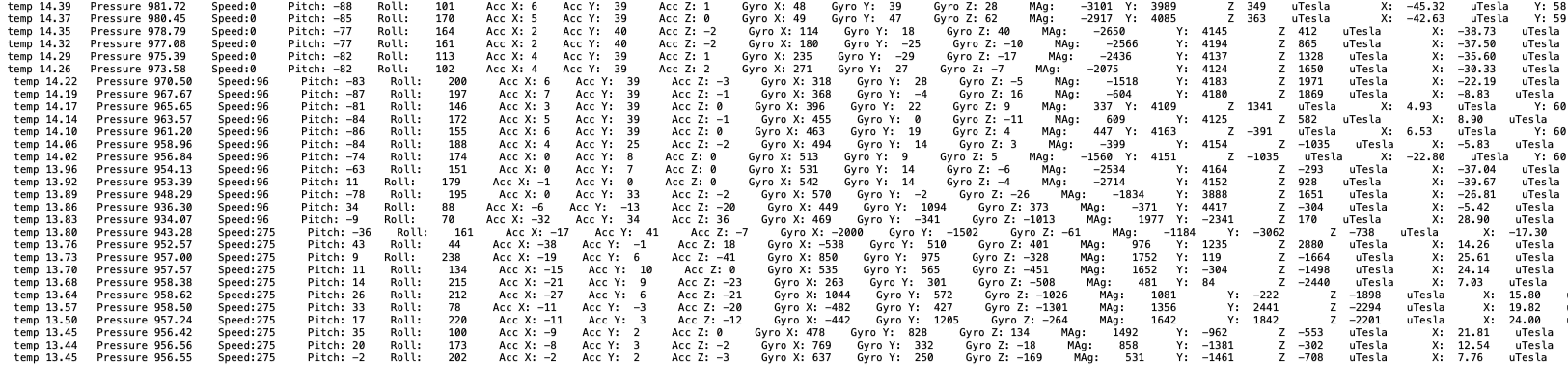
Im working on a model rocket flight computer and my data logging is a little messy. During a flight the data values can go from 0 to 200 to -300 and it makes the data log messy and hard to read, how could i go about fixing this? Here are 2 pictures of the data log file during flight, and the part of my code data logging.

code:
dataFile.open("FlightData.csv", FILE_WRITE);
// dataFile2.open("GPSData.csv", FILE_WRITE);
// dataFile3.open("EventData.csv", FILE_WRITE);
dataFile.print(millis());
dataFile.print(" ");
dataFile.print("BMP390: ");
dataFile.print(" ");
dataFile.print("Alt ");
dataFile.print(bmp.readAltitude(1013.25) - alt);
dataFile.print(" ");
dataFile.print(" temp ");
dataFile.print(bmp.temperature);
dataFile.print(" ");
dataFile.print("Pressure ");
dataFile.print(bmp.pressure / 100.0 );
dataFile.print(" ");
dataFile.print(" Speed:");
dataFile.print(Speed);
dataFile.print(" ");
dataFile.print(" Pitch: ");
dataFile.print(average_pitch);
dataFile.print(" ");
dataFile.print(" Roll: ");
dataFile.print(" ");
dataFile.print(average_roll);
dataFile.print(" ");
dataFile.print(" Acc X: ");
dataFile.print(average_x);
dataFile.print(" ");
dataFile.print(" Acc Y: ");
dataFile.print(average_y);
dataFile.print(" ");
dataFile.print(" Acc Z: ");
dataFile.print(average_z);
dataFile.print(" ");
dataFile.print(" Gyro X: ");
dataFile.print(average_x_gyro);
dataFile.print(" ");
dataFile.print(" Gyro Y: ");
dataFile.print(average_y_gyro);
dataFile.print(" ");
dataFile.print(" Gyro Z: ");
dataFile.print(average_z_gyro);
dataFile.print(" ");
dataFile.print(" MAg: ");
dataFile.print(" ");
dataFile.print(lis3mdl.x);
dataFile.print(" \tY: ");
dataFile.print(lis3mdl.y);
dataFile.print(" ");
dataFile.print(" \tZ ");
dataFile.print(lis3mdl.z);
dataFile.print(" ");
dataFile.print(" uTesla \tX: ");
dataFile.print(event.magnetic.x);
dataFile.print(" ");
dataFile.print(" uTesla \tY: ");
dataFile.print(event.magnetic.y);
dataFile.print(" ");
dataFile.print(" uTesla \tZ: ");
dataFile.print(event.magnetic.z);
dataFile.print(" ");
dataFile.print(" Heading: ");
dataFile.print(event.magnetic.heading);
dataFile.print(" ");
dataFile.print(" Pitch: ");
dataFile.print(event.magnetic.pitch);
dataFile.print(" ");
dataFile.print(" Roll: ");
dataFile.print(event.magnetic.roll);
dataFile.print(" ");
dataFile.print(" Status: ");
dataFile.print(event.magnetic.status);
dataFile.print(" ");
dataFile.print(" LSM6: ");
dataFile.print(" ");
dataFile.print(" Temp ");
dataFile.print(temp.temperature);
dataFile.print(" ");
dataFile.print(" Accel X: ");
dataFile.print(accel.acceleration.x);
dataFile.print(" ");
dataFile.print(" Accel Y: ");
dataFile.print(accel.acceleration.y);
dataFile.print(" ");
dataFile.print(" Accel Z: ");
dataFile.print(accel.acceleration.z);
dataFile.print(" ");
dataFile.print(" Gyro X: ");
dataFile.print(gyro.gyro.x);
dataFile.print(" ");
dataFile.print(" Gyro Y: ");
dataFile.print(gyro.gyro.y);
dataFile.print(" ");
dataFile.print(" Gyro Z: ");
dataFile.print(gyro.gyro.z);
dataFile.print(" ");
dataFile.print(" BMI270: ");
dataFile.print(" ");
dataFile.print(" Accel X: ");
dataFile.print(imu.data.accelX);
dataFile.print(" ");
dataFile.print(" Accel Y: ");
dataFile.print(imu.data.accelY);
dataFile.print(" ");
dataFile.print(" Accel Z: ");
dataFile.print(imu.data.accelZ);
dataFile.print(" ");
dataFile.print(" Gyro X ");
dataFile.print(imu.data.gyroX);
dataFile.print(" ");
dataFile.print(" Gyro Y: ");
dataFile.print(imu.data.gyroY);
dataFile.print(" ");
dataFile.print(" Gyro Z: ");
dataFile.print(imu.data.gyroZ);
//.print(" ");
//dataFile.print(" INA260: ");
//dataFile.print(" ");
//dataFile.print(" Voltage ");
//dataFile.print(ina260.readBusVoltage() / 1000);
//dataFile.print(" ");
//dataFile.print(" Current ");
//dataFile.print(ina260.readCurrent());
//dataFile.print(" ");
//dataFile.print(" Power ");
//dataFile.print(ina260.readPower());
dataFile.print(" ");
dataFile.print(" MS8607: ");
dataFile.print(" ");
dataFile.print(" Temp ");
dataFile.print(temp.temperature);
dataFile.print(" ");
dataFile.print(" Pressure ");
dataFile.print(pressure.pressure);
dataFile.print(" ");
dataFile.print(" Humidity ");
dataFile.print(humidity.relative_humidity);
dataFile.print(" ");
dataFile.print(" Launched: ");
dataFile.print(launchlook);
dataFile.print(" ");
dataFile.print(" Landed: ");
dataFile.print(landlook);
dataFile.print(" ");
dataFile.print(" Apogee: ");
dataFile.print(apogeelook);
dataFile.print(" ");
dataFile.print(" Ready for launch: ");
dataFile.print(readylook);
dataFile.print(" drouge: ");
dataFile.print(dstate);
dataFile.print(" ");
dataFile.print(" main: ");
dataFile.println(mainstate);